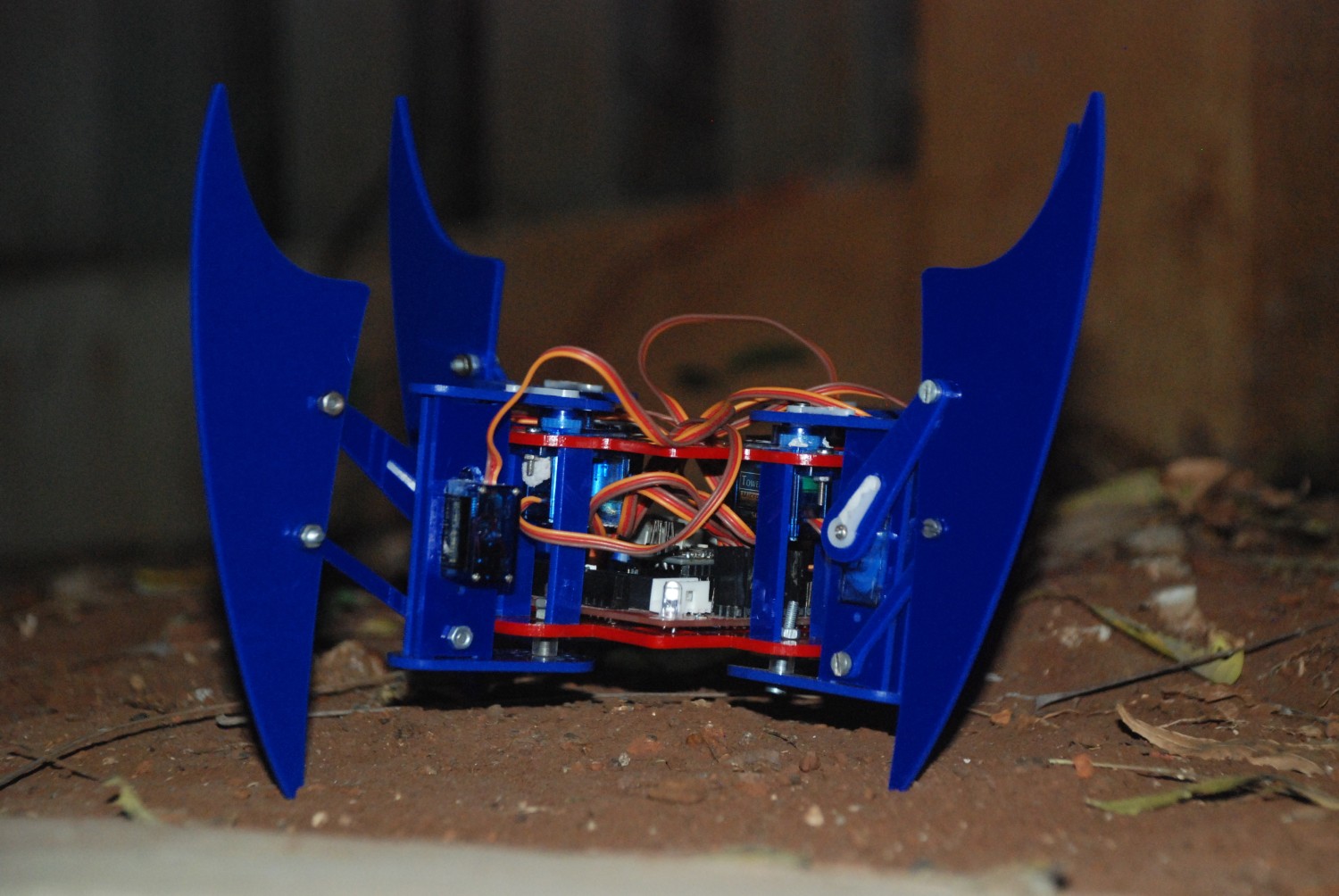
Miles é um robô aranha baseado no Arduino Nano que usa 4 pernas para caminhar e manobrar. 8 Servo motores SG90 / MG90 são usados como acionadores de pernas. Uma placa especialmente feita permite controlar e alimentar os motores e o Arduino Nano. A placa possui slots especiais para módulos IMU, Bluetooth e sensor infravermelho, que conferem autonomia ao robô. O corpo é montado em plexiglass de 2 mm de espessura cortado em cortador a laser, mas também pode ser impresso em impressora 3D. Um excelente projeto para entusiastas que estão aprendendo sobre cinemática inversa em robótica.
Inspirado no projeto mePed (www.meped.io), e usa código baseado nele.


Materiais
Componentes:
- Taxa (1)
- Componentes de milhas para montagem do corpo.
- Servo motores SG90 / MG90 (12)
- Aduino Nano (1)
- Regulador de tensão LM7805 (6)
- Switch (1)
- Capacitor eletrolítico de 0,33uF (2)
- Capacitor eletrolítico de 0,1uF (1)
- Conector Phoenix de 2 pinos de 3,08 mm (1)
- Conectores machos para servomotores.
Opcional:
- Conector de 2 pinos Relimate (1)
- Conector Relimate de 10 pinos (1)
- 4 no conector Relimate (1)
Etapa 1:

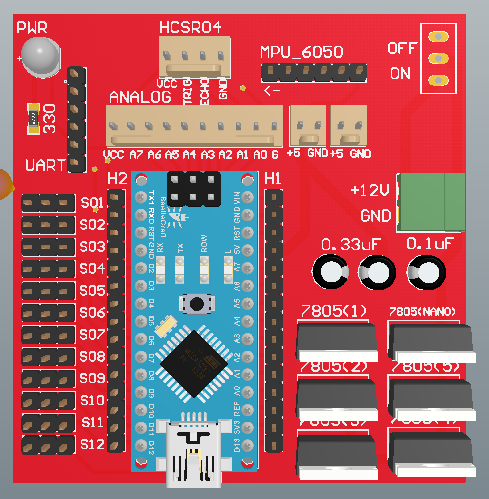

desenho esquemático e de placa Eu projeto minhas placas em Altium . 12 servo motores SG90 / MG90 podem consumir até 4-5 A quando operando simultaneamente, então o circuito deve ser capaz de lidar com altas correntes. Usei 7805 reguladores de tensão para alimentar os motores, porém cada um deles pode fornecer no máximo 1 A. Então conectei 6 LM7805s em paralelo, aumentando a corrente de saída disponível.
Baixe esquemas e arquivos Gerber do link .
Características do esquema:
- MPU6050 / 9250 são usados para medir ângulos.
- Corrente de saída de até 6 A.
- Fonte de alimentação isolada para servomotores.
- Saída para sensor ultrassônico HCsr04.
- Existem periféricos para Bluetooth e I2C /
- Relimate possui todos os contatos analógicos para sensores e atuadores.
- Saídas de 12 servomotores.
- LED indicador.
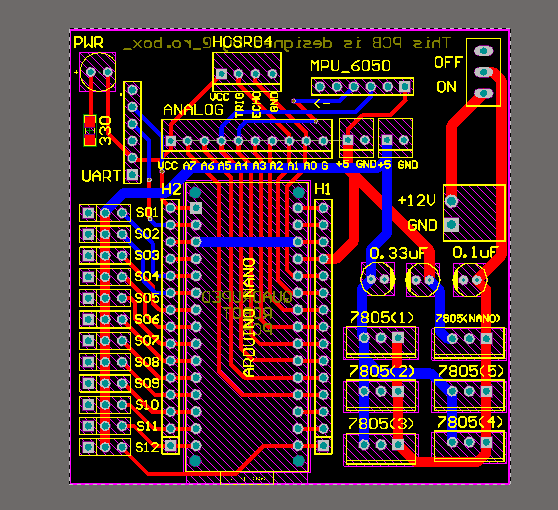
Características do conselho:
- 77 × 94 mm.
- 2 camadas FR4.
- 1,6 mm.
Etapa 2: soldar os componentes e carregar o código

Soldar os componentes conforme eles crescem e começam com dispositivos de montagem em superfície.
No meu circuito, há apenas um resistor TMP. Adicione pinos fêmeas ao Arduino e LM7805 para que possam ser trocados conforme necessário. Solde os pinos machos nos conectores do motor.
O circuito usa alimentação de 5V, separada para os motores e o Arduino. Verifique se há curto-circuitos de aterramento em todos os barramentos de alimentação - saída Arduino 5 V, saída do motor VCC e entrada Phoenix de 12 V.
Após verificar a placa, você pode programar o Arduino. Postei o código de teste no Github . Encha-o e monte o robô.
Etapa 3: montagem da caixa

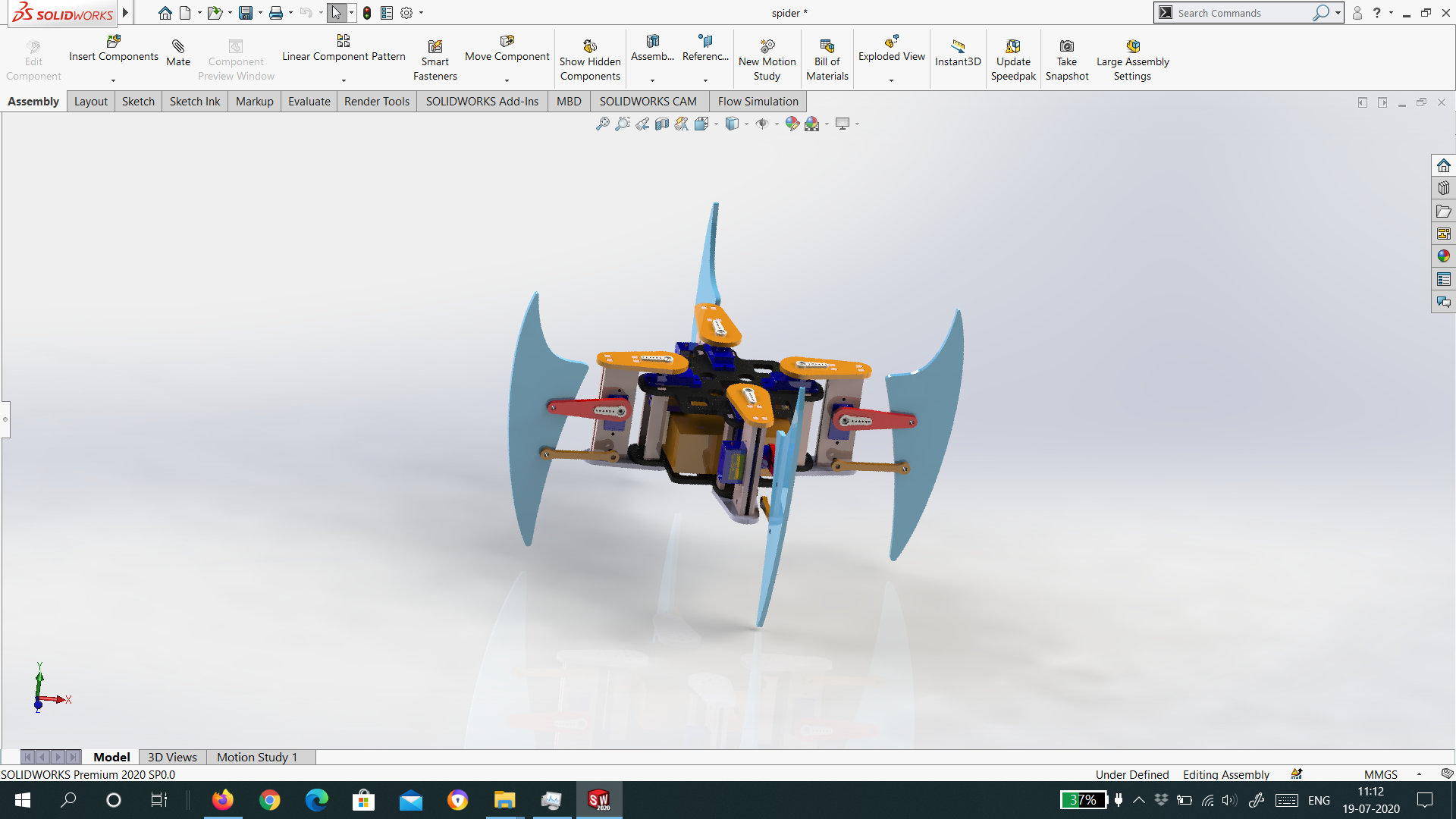
No total, o robô é composto por 26 peças, que podem ser impressas em uma impressora 3D ou cortadas em plexiglass de 2 mm. Usei folhas de acrílico vermelho e azul de 2 mm para fazer o robô parecer o Homem-Aranha.
Existem várias conexões no corpo que podem ser fixadas com os parafusos e porcas M2 e M3. Os servomotores são fixados com parafusos M2. Instale as baterias e a placa antes de aparafusar a tampa.
Eu carreguei os arquivos necessários para o Github .
Etapa 4: conectar e testar
Conecte-se na seguinte ordem:
- Motor rotativo frontal esquerdo.
- Motor de elevação frontal esquerdo.
- Motor traseiro de giro esquerdo.
- Motor de elevação traseiro esquerdo.
- Motor giratório traseiro direito.
- Motor de elevação traseiro direito.
- Motor de giro frontal direito.
- Motor de elevação frontal direito.
Inicie o robô deslizando o interruptor.
Etapa 5: melhorias futuras
Cinemática inversa
O código atual usa uma abordagem posicional - definimos os ângulos que os motores devem girar para realizar um determinado movimento. A cinemática inversa dará ao robô um andar mais sofisticado.
Controle de Bluetooth
O conector UART na placa permite que você conecte um módulo Bluetooth, por exemplo, HC-05, para controlar o robô sem fio de um smartphone.