
(Betaflight 4.1, ainda não gravei em novas configurações)
Último artigo - Do solo para o Quadrocopter FPV: Introdução
Outro dia, decidi atualizar para o Betaflight 4.2 e todos ao meu redor recomendam ativar a filtragem com o DShot bidirecional. A propósito, foi em 4.1.
Primeiro, vamos entender um pouco o que é filtragem e por que é necessário.
Por padrão, o Betaflight fornece configurações gerais de filtragem adequadas para a maioria dos modelos. Mas, para obter o melhor desempenho, a filtragem pode ser ajustada de maneira diferente, pois pode ser um exagero ou não o suficiente para um drone danificado.
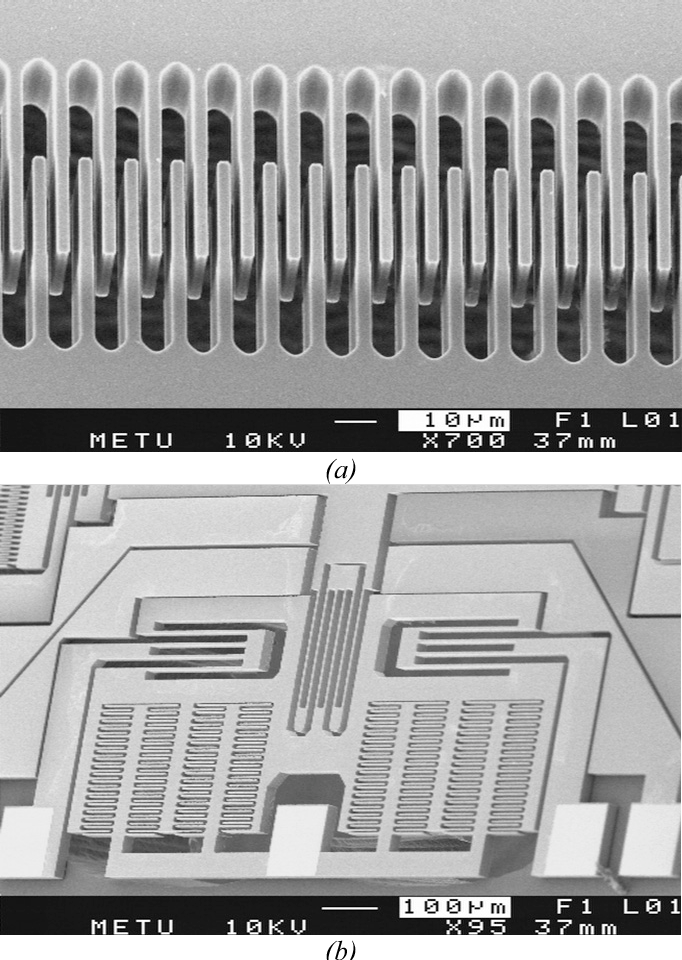
Giroscópio MEMS
Cada quadcopter possui um controlador de vôo FC, que é essencialmente um cérebro. Esses controladores também possuem um chip digital, que geralmente é chamado de giroscópio. É um sensor que detecta movimento. Ele contém um pequeno dispositivo eletromecânico chamado MEMS (Micro Electro Mechanical System).
Existem "plugues" ressonantes mecanicamente dentro deste dispositivo. Esses plugues estão localizados nos três eixos (inclinação, rotação, guinada) e o movimento (parte mecânica) cria flutuações de tensão (parte elétrica).
Flutuações de tensão (flutuações) são de fato ondas analógicas que são convertidas em informações digitais para processamento pelo controlador de vôo. Quando dizemos 8k giroscópio, significa que 8000 vezes por segundo, o sinal analógico é convertido em digital e processado pelo controlador, o firmware, neste caso o Betaflight.
Barulho
Ruído é um termo que ouvimos muito, mas o que é? Como regra, imaginamos imediatamente ruídos sonoros ou ambientes ruidosos no próximo formigueiro de 23 andares.
O giroscópio e o controlador PID enfrentam um problema semelhante. Como o giroscópio está localizado no controlador de vôo, que está acoplado ao quadro, ele apresenta ruído. O ruído pode vir de: motores, hélices, velocidade do vento, ruído geral do quadro, eletrônicos, etc.
Controlador PID
O controlador PID é um sistema que ajusta a posição do quadcopter de acordo com os manípulos (seu controle) ou uma determinada posição (bem, seja qual for). O PID é ajustado por três parâmetros - P, I e D. Infelizmente, neste artigo, não consideraremos o ajuste do PID em detalhes. Se você é piloto, você já sabe, e se é iniciante, haverá um artigo separado sobre esse tópico.
Este sistema funciona bem quando a quantidade de ruído é mínima, caso contrário, podemos enfrentar problemas como oscilação (vibração) ou superaquecimento de motores.
O termo d em um controlador PID está especialmente relacionado ao ruído. D suaviza movimentos rápidos, mas o cálculo de D no controlador PID aumenta significativamente o ruído no sinal. Isso significa que o ruído do giroscópio é amplificado significativamente pelo valor do termo D e, portanto, estamos filtrando em dois lugares - o giroscópio e D.
Como exemplo desse aumento, mostrarei os seguintes registros:
Primeiro gráfico - giroscópio
Segundo gráfico - PID
Terceiro - motores
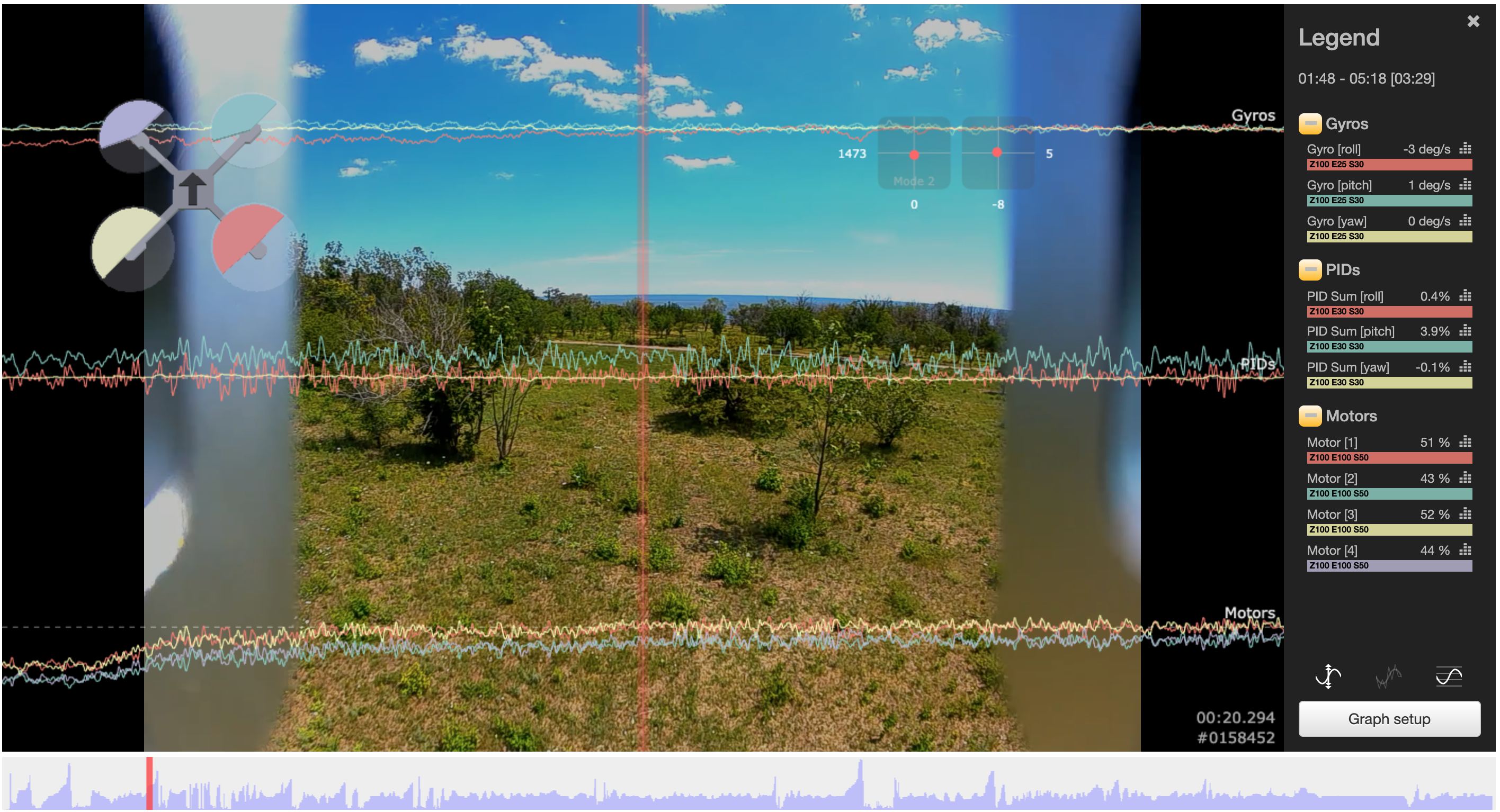
(hélices normais , com uma filtragem ligeiramente reduzida)
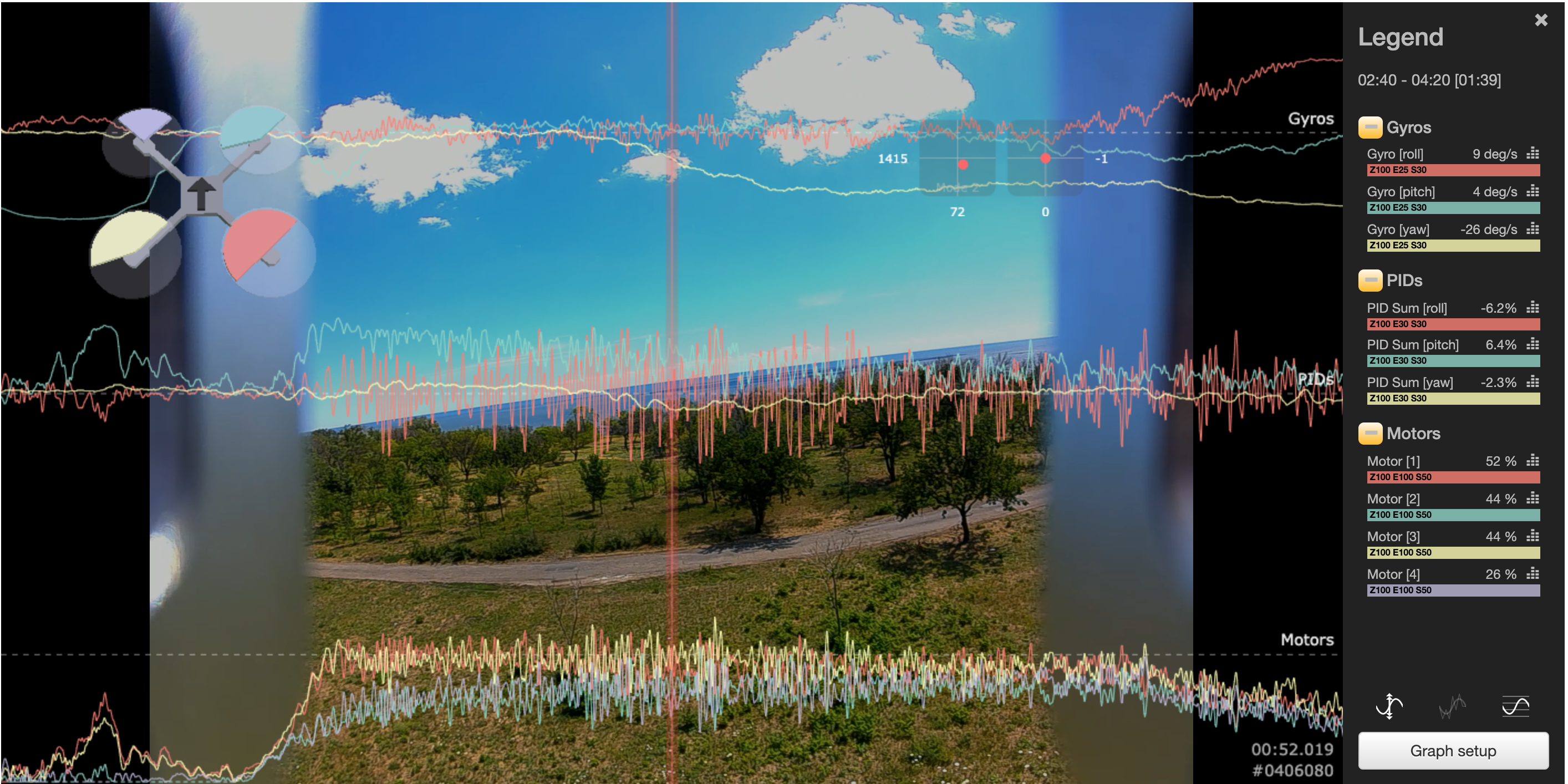
(Como você pode ver, as vibrações de hélices ruins são amplificadas no estágio do controlador PID, o que leva a um estresse excessivo nos motores, eles são literalmente salsicha).
Screenshots de - Blackbox Explorer .
Filtragem
O processo de filtragem é remover o excesso de ruído do sinal do giroscópio. Mas quanto do sinal do giroscópio queremos manter e quanto filtrar?
Honestamente, não posso dizer em cores, mas aconteceu que no voo beta, o ruído ou as vibrações são medidos em Hz. 1Hz - uma rotação por segundo. Isso é feito para facilitar a visualização e trabalhar com essas variáveis. Além disso, a turbulência é tecnicamente chamada de "taxa de mudança de rotação" - a frequência da mudança de rotação.
A velocidade do quadcopter está na região de 0 a 30 Hz. Acima de 30Hz a 80Hz, temos um propwash, quando o quadcopter sacode da turbulência em seus próprios fluxos. As informações na faixa de 0 a 80Hz são importantes para o controlador PID, portanto não as tocaremos.
Com PIDtoolbox você pode comprar estas cartas:

Passe baixo
Filtros

Como mostra o gráfico anterior - o sinal do giroscópio contém informações de 0 Hz a 1000 Hz, mas estamos interessados apenas na faixa de 0 a 80 Hz, pois esse é o movimento real do quadcopter que o controlador PID deve conhecer. Portanto, precisamos de uma solução de filtragem para permitir que baixas frequências passem pelo controlador PID enquanto atenuam altas frequências e, para isso, podemos usar um filtro passa-baixa.
Os filtros passa-baixas permitem que os sinais de baixa frequência passem e atenuam as altas frequências, que são principalmente apenas ruído.
A frequência de corte é definida e o controlador simplesmente reduz os sinais acima dessa frequência. Curva de atenuaçãopermite que você não corte tudo em um limpo e, quanto maior a frequência do ruído, mais sua atenuação ocorre sem problemas.
Os pilotos geralmente cometem o erro de ajustar esse filtro na mesma frequência que o ruído visível. Por exemplo, a 200Hz. Como o filtro atenua o ruído sem problemas, a instalação de um filtro não dará muitos resultados. O filtro deve estar definido para frequências mais baixas. Talvez até 80Hz.
Quanto mais baixo você instalar esse filtro, mais filtragem ocorrerá.
Há uma coisa simples a ter em mente ao configurar a filtragem. Quanto mais filtragem, maior o atraso. É claro que ele está em milissegundos e não é significativo, mas para um controlador PID é crítico. Como ele começará a reagir aos eventos posteriormente, o que significa que tentará alinhar o quadcopter no passado :)
Filtro de entalhe
O entalhe é traduzido como entalhe, na verdade se parece com o seguinte: Os
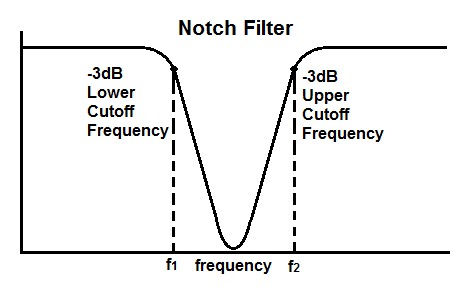
filtros eliminam parte do ruído abaixo e parte do ruído acima . Desde o Betaflight 3.1, esses filtros são dinâmicos e se ajustam a diferentes níveis de ruído.
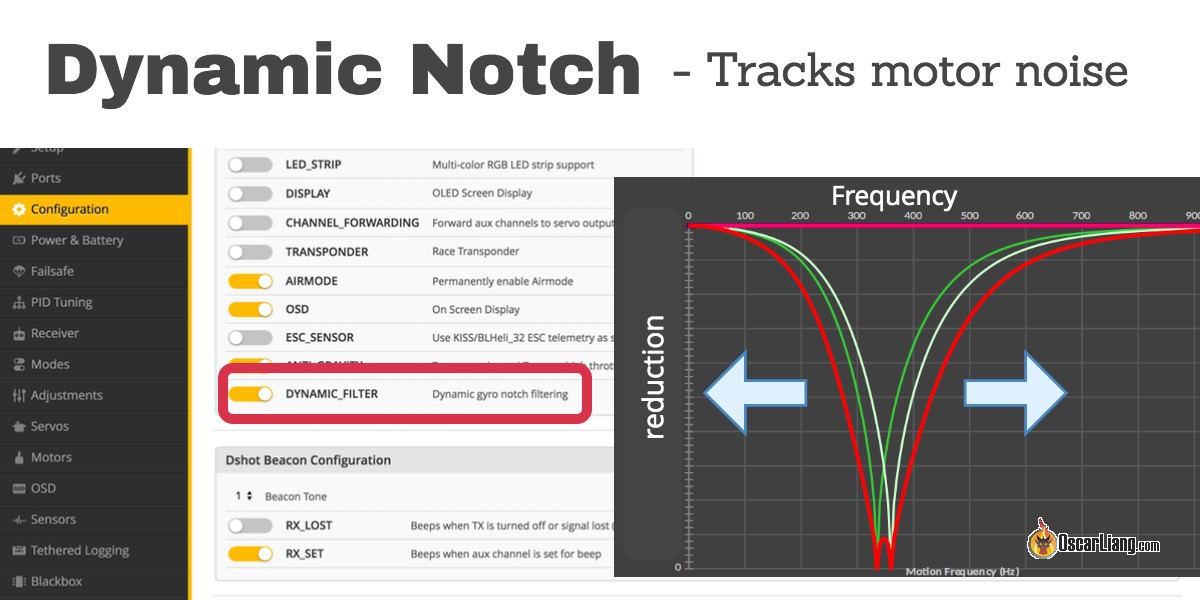
Os filtros são usados em conjunto com os filtros passa-baixo, mas já são usados para filtrar o ruído dos motores localizados acima.
Filtragem do termo D
Como mencionado acima, D é capaz de multiplicar o ruído do giroscópio, portanto o Betaflight tem filtragem D. Abaixo, nos trastes, você pode ver o nível de ruído antes e depois da filtragem.
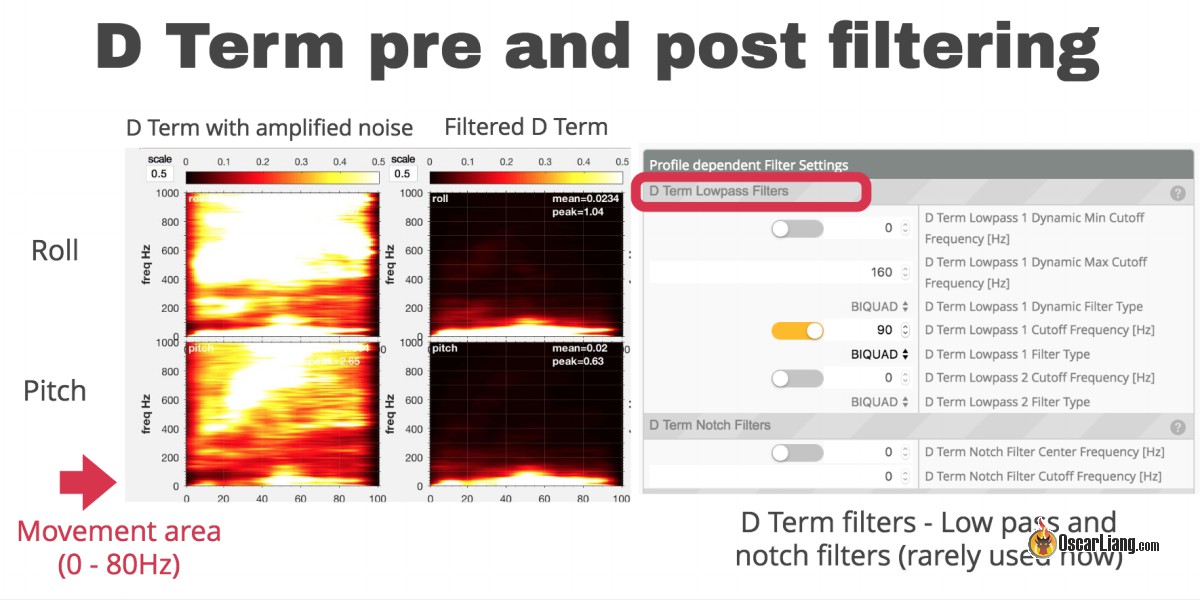
Não há um entendimento claro na comunidade sobre se é necessário filtrar D ou não. Mas há uma regra de motores quentes, quanto menos filtragem e maior D, mais eles aquecem e podem até queimar. Mas na direção oposta, temos um atraso.
Filtro RPM
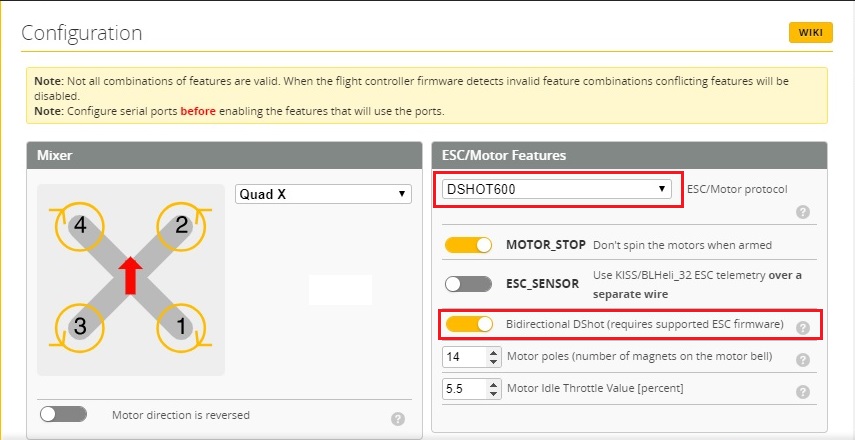
Então, na verdade, o que comecei a usar de novo é a filtragem de RPM. Ele funciona através de um protocolo DSHOT bidirecional que permite ao controlador de vôo conhecer as RPM exatas de um motor em particular. E com base nesses dados, a filtragem é aplicada.
(Seu ESC deve suportar DHSOT de dupla face)
Firmware para ESC, de 3.7
Se os motores estiverem quentes, isso é um problema. Motores quentes podem ser um sinal de que estão recebendo muito ruído e estão tentando responder às vibrações com tanta frequência que o calor é gerado.
Os motores podem aquecer por várias razões, como uma estrutura antiga, sinos dobrados nos motores, equilíbrio desequilibrado, bombas extras no seu drone.
É claro que é melhor ter, como se costuma dizer, construção limpa e que tudo seria novo, mas você pode primeiro tentar configurar a filtragem.
Para começar, você pode começar aumentando a filtragem D, executando etapas de 20 Hz. Verifique a temperatura após cada etapa e encontre seu alcance ideal.
E você deve procurá-lo entre a temperatura dos motores e as vibrações. Como mencionado acima, embora a filtragem seja projetada para reduzir a quantidade de ruído, ela pode impor alguns atrasos e o controlador PID pode não acompanhar. E não importa quão engraçado seja, causar vibrações. Mas essas vibrações não pertencem à lavagem propwash. Esta é apenas uma operação ineficiente do PID.
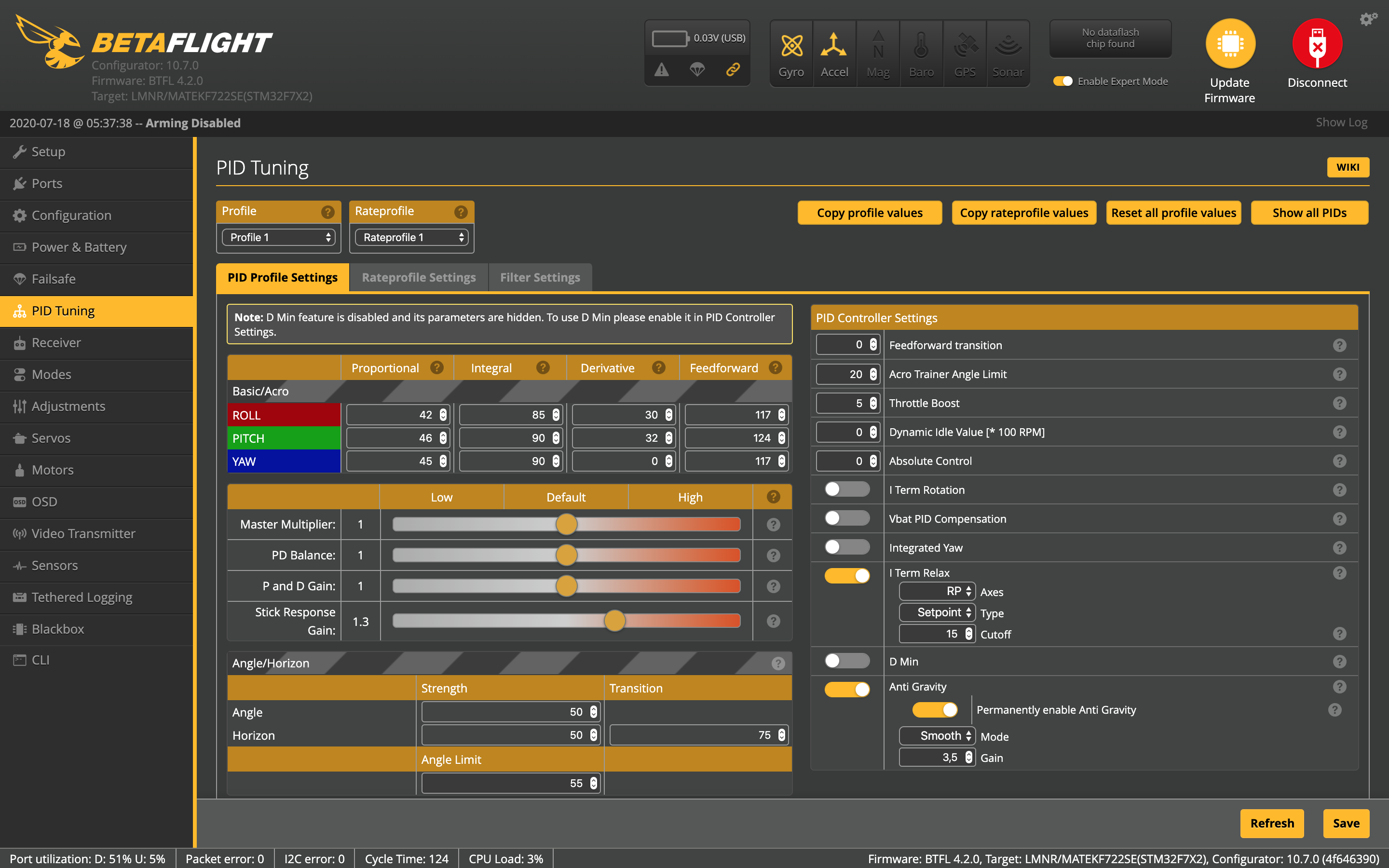
As versões recentes do Betaflight têm controles deslizantes, tente não alterar os valores dos próprios filtros, mas tente usar esses controles deslizantes "principais".
No momento em que tenho essas configurações com o filtro RPM ativado, talvez eu tente reduzir ainda mais a filtragem:
