Depois de assistir a vídeos no Youtube e de meus filhos babarem, decidi tentar a automontagem desse dispositivo em scooters giroscópios alugados. Discutindo sobre a oportunidade de fazer você mesmo ou de comprá-lo, me convenci de que este é um brinquedo, e sazonal, e para meus filhos, o clima não dá para com um único aparelho. Além disso, a experiência de montar uma máquina CNC doméstica desempenhou um papel importante na autoconfiança, e a popularidade da própria tendência das pranchas flutuantes e o efeito surpreendente nas pessoas ao meu redor tiveram um papel importante.
Experiência na montagem de uma scooter giroscópica por conta própria
Entrando no trabalho, decidi primeiro testar o conceito e determinar a potência necessária das unidades eletromecânicas para justificar novos investimentos em componentes.
A primeira versão (segway)
Do ponto de vista mecânico, a versão segway me pareceu mais simples (não tem giro central carregado), além disso, tudo que encontrei no youtube é segway caseiro.
Apesar de ter bastante experiência em programação e trabalho com controladores, decidi não escrever o software sozinho, mas sim encontrar as soluções mais prontas. Além disso, raramente consigo manter minha motivação por mais de um mês, e depurar software com nós eletromecânicos raramente termina em uma vitória absoluta, mais frequentemente em um acordo, e o pensamento de que a perfeição não foi alcançada me atormentaria.
Como resultado, a escolha recaiu sobre o trabalho do Segway Clone de Ovomaltine (a fonte está no GitHub). Este projeto me pareceu o hardware mais maduro e de suporte que tenho (Arduino, MPU-6050, drivers de motor com 2 e 3 sinais de controle por canal). O projeto é comentado de forma abrangente, o que permite não se aprofundar na análise de nuances e, consequentemente, não adivinhar as lacunas.
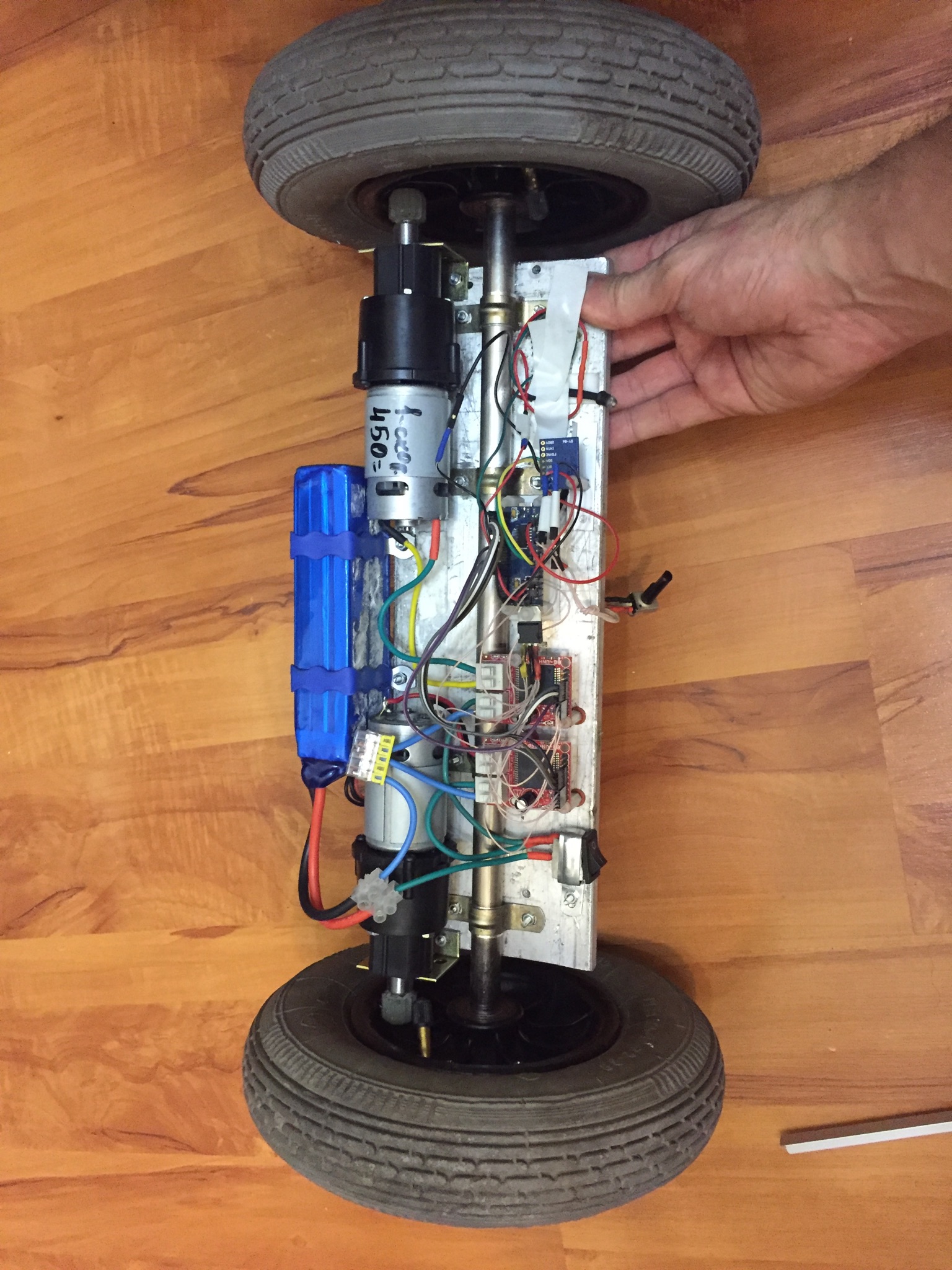
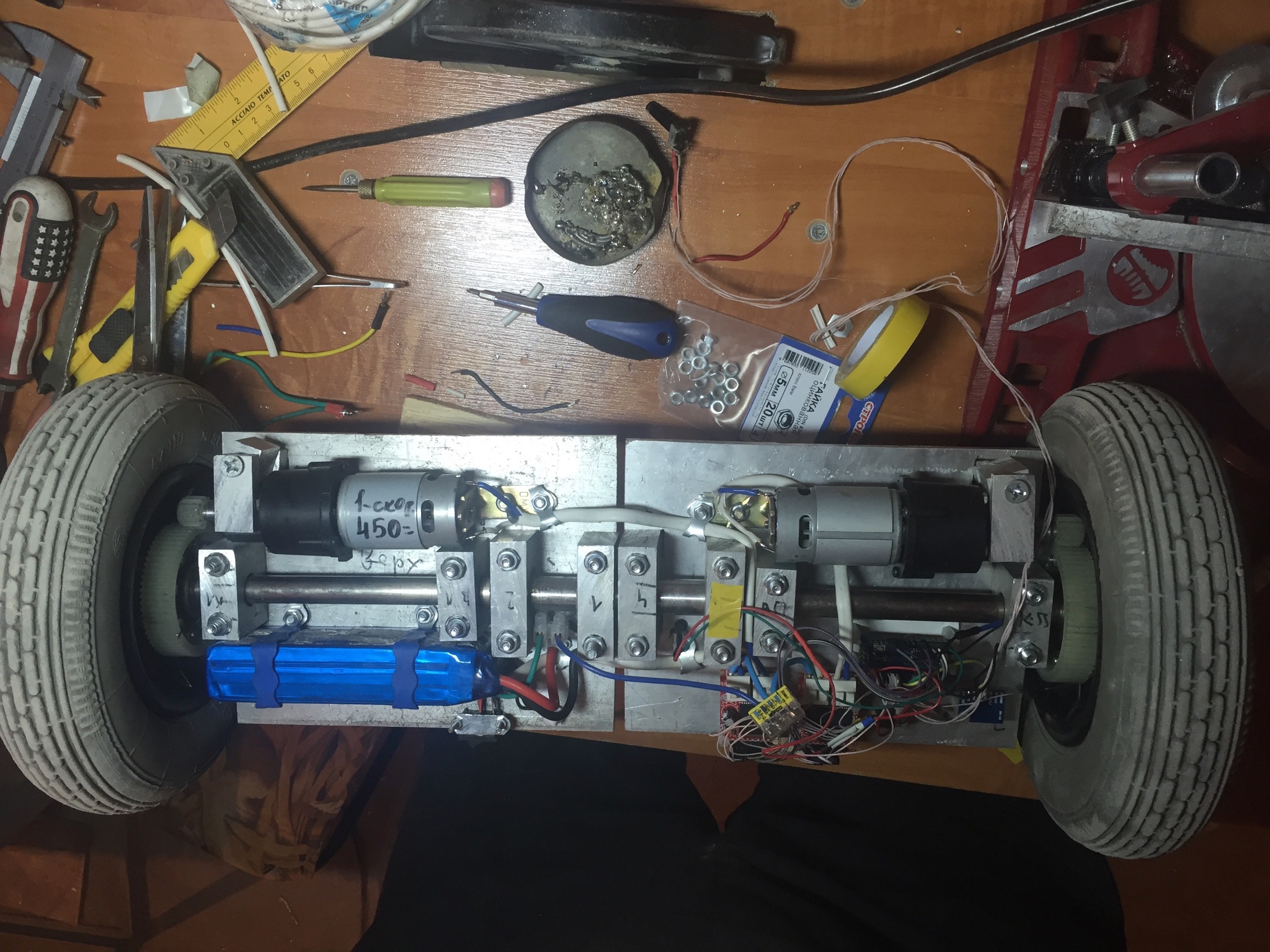
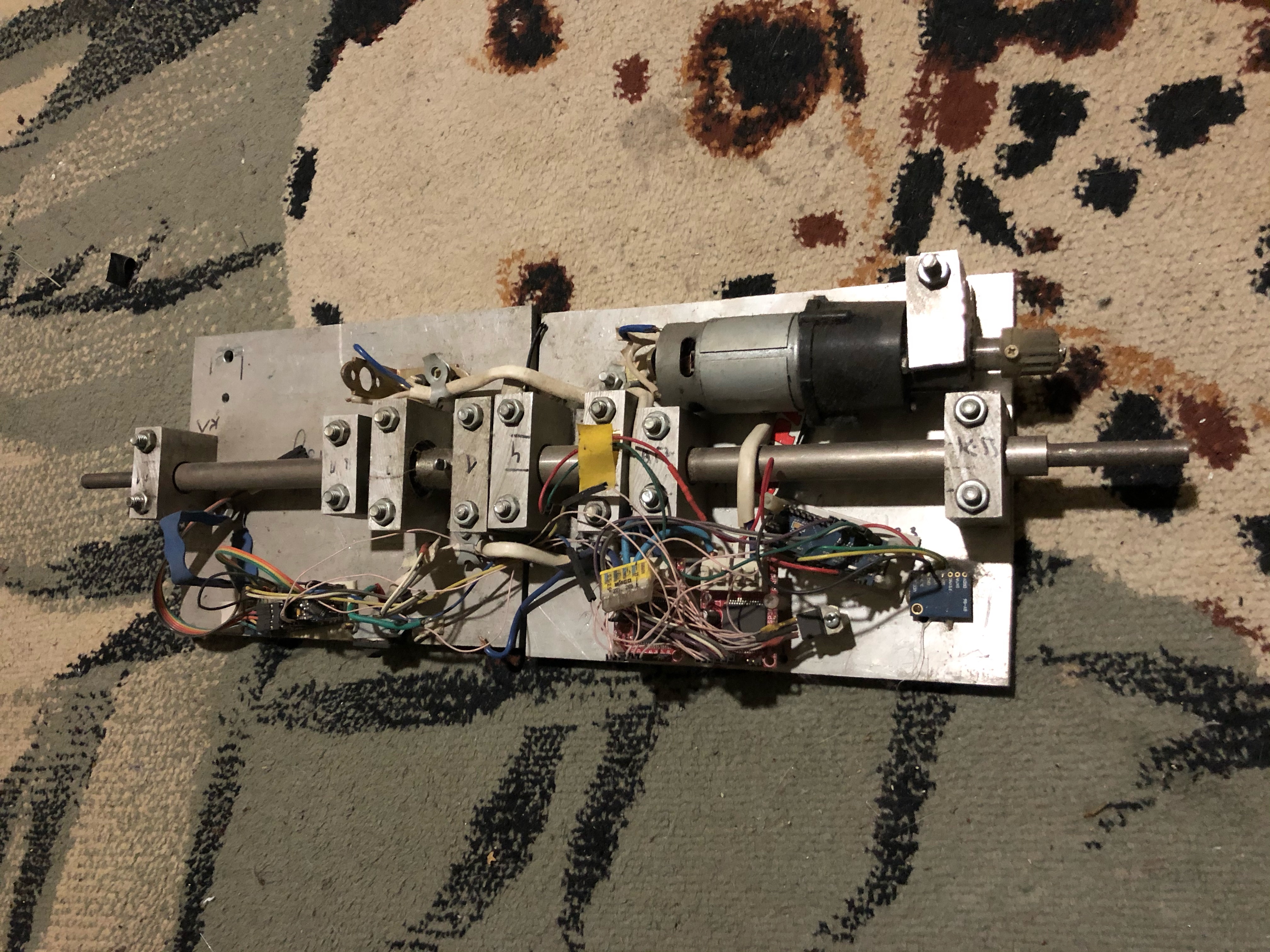
Após um pequeno atraso, a plataforma de teste foi golpeada:
Espessura da placa de alumínio 12 mm
Eixo com um diâmetro de 14 mm - guia da impressora matricial
Diâmetro dos grampos de construção 14 mm
Rodas - frente da cadeira de rodas (8 "de diâmetro, rolamentos embutidos).
Motores e caixas de engrenagens planetárias de chaves de fenda 18V
Engrenagens de transmissão sobre rodas de moedores elétricos de carne
Bateria 12V 5Ah Li-pol (esquerda após a desaceleração da tendência de construção de quadcopter)
Driver Vhn3sp30
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... e uma experiência inestimável de sair da motivação do sofá!
Isso é tudo. Tudo bom!