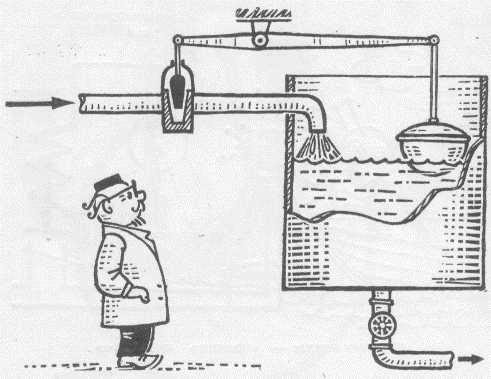
É duas posições porque tem 2 posições: aberto (ligado) e fechado (desligado), na literatura de língua inglesa liga-desliga. Existem também três ou mais reguladores posicionais, ou seja, a válvula de reposição de água é aberta ou fechada para as posições principais, e é adicionada a posição "ligeiramente aberta". Após escoar a água do vaso sanitário, a bóia desce abrindo a válvula completamente e a água entra no tanque com pressão total, porém, mais perto de atingir o nível ajustado, a bóia sobe fechando a válvula e diminuindo o fluxo de água. E assim que o nível de água atual (em inglês PV - Process Value - Current value ) subir para o conjunto (em inglês SP - Set Point - Setpoint), a válvula fecha e o nível de água para de subir. No caso descrito, o regulador é ainda mais parecido com o proporcional - a ação reguladora diminui com a diminuição do mismatch (erro), ou seja, a diferença entre o nível ajustado e o nível atual.
Abrindo ligeiramente o tubo inferior para drenar a água, será possível atingir tal estado quando a válvula estiver totalmente aberta e o nível de água não diminuir (ou seja, o influxo de água torna-se igual à fonte) - o sistema entra em um estado de equilíbrio. Mas o problema é que esse estado é muito precário - qualquer perturbação externa pode quebrar esse equilíbrio - digamos que podemos pegar um pouco de água do tanque, e então pode acontecer que toda a água flua para fora do tanque (devido à mudança de pressão), ou o tubo de recarga ficará entupido e o fluxo diminuirá, ou a bóia quebrará e a água transbordará. Essa é a complexidade dos sistemas de controle de edifícios - sistemas reais são bastante complexos e têm muitas características que precisam ser levadas em consideração.Existe uma característica como a inércia do sistema - se desligar o recuperador aquecido, ele permanecerá quente por muito tempo, razão pela qual se utilizam reguladores mais complexos para controlar a temperatura, nomeadamentePID - Diferencial Integral Proporcional . Cada um dos componentes tem suas próprias características - todos eles se comportam de maneira diferente em condições diferentes, mas quando usados juntos, eles permitem alcançar uma regulação bastante clara. Todos esses sistemas são calculados de acordo com as fórmulas, mas, neste caso, é apenas importante entender como o sistema se comportará quando os coeficientes do controlador PID mudarem: com um aumento no link proporcional, o impacto inicial aumenta e, assim, o sistema será capaz de atingir rapidamente os parâmetros necessários. Mas, se você exagerar, poderá ocorrer ultrapassagem, o que pode ser ainda pior do que a baixa velocidade do sistema.
Durante a existência do TAU, foram encontradas descrições matemáticas de muitos processos, e agora podemos prever como o sistema se comportará em determinadas circunstâncias. Existem muitos programas de simulação onde você pode definir os parâmetros do sistema, definir os parâmetros do regulador e ver aproximadamente o que vai acontecer. Andando pela Internet, encontrei um site Excel para engenheiros, e existem vários simuladores de reguladores, graças aos quais é possível observar a mudança no processo ao mudar os fatores de controle. O mais fácil de repetir era, claro, o controle ON-OFF., isto é, em russo, um regulador de duas posições. Deixe-me lembrar o princípio de operação: se o valor atual do processo (Valor do processo = PV) é a temperatura, por exemplo, abaixo do setpoint (SP), então o regulador liga (OP) - os elementos de aquecimento são acionados na potência máxima. Assim que a temperatura atinge o ponto de ajuste, o regulador desliga a alimentação de tensão para os elementos de aquecimento.
Fazendo um simulador de JavaScript
Para construir um gráfico, usarei a biblioteca ZingChart - ela acabou sendo bastante simples e fácil de usar. Existem muitos exemplos na documentação para os quais você pode construir qualquer coisa. O princípio de plotagem é bastante simples - há uma matriz de valores que são colocados automaticamente no gráfico em ordem e, portanto, um gráfico de processo contínuo aparece a partir de algumas centenas de pontos. Aliás, no original em Excel, tudo é feito da mesma forma - 300 valores são gerados e um gráfico é construído.
Na verdade, é a geração de valores que é mais difícil, nomeadamente a dificuldade de descrever corretamente um processo que reage corretamente às nossas ações de controle - ligar os elementos de aquecimento - a temperatura sobe, desligar - diminui, mais a inércia do sistema deve ser colocada aqui. Além disso, o ambiente de aquecimento pode ser diferente e alguns meios aquecem e resfriam mais rápido, e alguns vice-versa, e se ajustarmos o nível, com o mesmo fluxo de cima, o nível aumentará mais alto no tanque onde a área inferior é menor. Tudo isso levo ao fato de que o processo vai depender também da transmissão (ganho). No original, um parâmetro de atraso também foi introduzido no processo (bem, como o sistema não responde imediatamente ao sinal de controle), mas decidi abandoná-lo - dois são suficientes. Mas ele acrescentou uma mudança na configuração,embora na verdade o ponto de ajuste possa mudar de zero a 100, acima de 100 o processo começa a se comportar de maneira diferente e, aparentemente, a razão é que a fórmula do processo é universal e não descreve um caso particular. Em geral, vamos começar:
Criamos 5 campos para entrada de parâmetros, colocamos tudo isso em uma tabela, que pintamos em uma bela cor acima em css e colocamos no centro:
<table align="center" oninput="setvalues ();">
<tr>
<td>
Process parameters <br>
Gain: <input id="gain" type="number" value ="1" ><br>
Time Constant: <input id="time" type="number" value ="100" ><br>
</td>
<td>
Control parameters <br>
SetPoint(0-100): <input id="sp" type="number" value ="50"><br>
Hysteresis: <input id="hyst" type="number" value ="1">%<br>
</td>
<td>
Plot parameters <br>
Points: <input id="points" type="number" value ="200"><br>
</td>
</tr>
</table>Como você pode ver, cada vez que o valor dos campos dentro da tabela muda, a função setvalues () será chamada. Nele, lemos os dados de cada campo em variáveis especiais.
let gain = document.getElementById('gain').value;
let time = document.getElementById('time').value;
let sp = document.getElementById('sp').value;
let points = document.getElementById('points').value;
let hyst = document.getElementById('hyst').value;Como já mencionado, para construir um gráfico, você precisa de arrays com dados com base nos quais o gráfico será construído, portanto, criamos um monte de arrays:
let pv = []; //
let pv100 = []; // *100
let op = []; // 1 , 0
let pvp = 0; //
let low = sp-sp*hyst/100;//
let high = +sp+(sp*hyst/100); //
let st=true; // Vou explicar um pouco sobre a histerese. A situação é a seguinte: quando a temperatura atinge o valor definido, os elementos de aquecimento são desligados e imediatamente (na verdade, não imediatamente, porque há inércia) começa o processo de refrigeração. E tendo resfriado um grau ou mesmo uma certa fração de grau - o sistema percebe que já ultrapassou o escopo da tarefa novamente e é necessário ligar os elementos de aquecimento novamente. Neste modo, os elementos de aquecimento irão ligar e desligar com muita frequência, talvez até algo que várias vezes por minuto - para equipamentos este modo não é muito bom e, portanto, para excluir tais flutuações, é introduzida a chamada histerese - banda morta - banda morta - digamos 1 grau superior e abaixo do ponto de ajuste, não reagiremos, e então o número de comutações pode ser reduzido significativamente. Portanto, a variável low é o limite inferior do setpoint, e a variável high é o superior.A variável st mantém o controle de atingir o nível superior e permite que o processo caia para o fundo. A lógica de todo o processo está em loop:
for (var i=0;i<points;i++) {
if (pvp<=(low/100)) {
st=true;
op[i]=1;
}//
else if (pvp<=(high/100)&& st) op[i] = 1;
else { st=false; op[i]=0;}
let a = Math.pow(2.71828182845904, -1/time);
let b = gain*(1 -a);
pv[i] = op[i]*b+pvp*a;
pv100[i] = pv[i]*100;
pvp = pv[i];
}Como resultado, obtemos um array com um determinado número de pontos, que enviamos para o script de gráficos.
scaleX: {
zooming: true
},
series: [
{ values: op , text: 'OP' },
{ values: pv100 , text: 'PV'}
]
};
Código completo sob o spoiler
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title></title>
<script src="https://cdn.zingchart.com/zingchart.min.js"></script>
<style>
html,
body,
#myChart {
width: 100%;
height: 100%;
}
input {
width: 25%;
text-align:center;
}
td {
background-color: peachpuff;
text-align: center;
}
</style>
</head>
<body>
<table align="center" oninput="setvalues ();">
<tr>
<td>
Process parameters <br>
Gain: <input id="gain" type="number" value ="1" ><br>
Time Constant: <input id="time" type="number" value ="100" ><br>
</td>
<td>
Control parameters <br>
SetPoint(0-100): <input id="sp" type="number" value ="50"><br>
Hysteresis: <input id="hyst" type="number" value ="2">%<br>
</td>
<td>
Plot parameters <br>
Points: <input id="points" type="number" value ="250"><br>
Animation: <input type="checkbox" id="animation">
</td>
</tr>
</table>
<script>
setTimeout('setvalues ()', 0);
function setvalues (){
let gain = document.getElementById('gain').value;
let time = document.getElementById('time').value;
let sp = document.getElementById('sp').value;
let points = document.getElementById('points').value;
let hyst = document.getElementById('hyst').value;
let anim = document.getElementById('animation').checked ? +1 : 0;
let pv = []; //
let pv100 = []; // *100
let op = []; // 1 , 0
let pvp = 0; //
let low = sp-sp*hyst/100; //
let high = +sp+(sp*hyst/100); //
let st=true; //
for (var i=0;i<points;i++) {
if (pvp<=(low/100)) {
st=true;
op[i]=1;
}
else if (pvp<=(high/100)&& st) op[i] = 1;
else { st=false; op[i]=0;}
let a = Math.pow(2.71828182845904, -1/time);
let b = gain*(1 -a);
pv[i] = op[i]*b+pvp*a;
pv100[i] = pv[i]*100;
pvp = pv[i];
}
ZC.LICENSE = ["569d52cefae586f634c54f86dc99e6a9", "b55b025e438fa8a98e32482b5f768ff5"];
var myConfig = {
type: "line",
"plot": {
"animation": {
"effect": anim,
"sequence": 2,
"speed": 200,
}
},
legend: {
layout: "1x2", //row x column
x: "20%",
y: "5%",
},
crosshairX:{
plotLabel:{
text: "%v"
}
},
"scale-y": {
item: {
fontColor: "#7CA82B"
},
markers: [
{
type: "area",
range: [low, high],
backgroundColor: "#d89108",
alpha: 0.7
},
{
type: "line",
range: [sp],
lineColor: "#7CA82B",
lineWidth: 2,
label: { //define label within marker
text: "SP = "+sp,
backgroundColor: "white",
alpha: 0.7,
textAlpha: 1,
offsetX: 60,
offsetY: -5
}
}]
},
scaleX: {
zooming: true
},
'scale-y-2': {
values: "0:1"
},
series: [
{ scales: "scale-x,scale-y-2", values: op , 'legend-text': 'OP' },
{ values: pv100 , text: 'PV'}
]
};
zingchart.render({
id: 'myChart',
data: myConfig,
height: "90%",
width: "100%"
});
}
</script>
<div id='myChart'></div>
</body>
</html>Bem, como o simulador está pronto, é hora de verificar como funciona. Você pode testar aqui o mesmo código, mas no github: simulador de controle liga-desliga
Configuração padrão: link amplificador 1, constante de tempo 100 segundos, histerese 2%

Agora, se você definir uma configuração maior, por exemplo 92, de repente o processo fica muito lento, embora a configuração seja 50 ele ganha nos mesmos 71 segundos, mas só então a curva começa a se aproximar da tarefa de forma mais lenta exponencialmente, e atinge o setpoint em apenas 278 segundos, por isso foi necessário expandir a faixa de plotagem para 300 pontos

Este exemplo é muito indicativo, transferindo a situação para um modelo com temperatura, podemos concluir que não há potência do aquecedor suficiente: o aquecedor está 100% carregado, mas a temperatura para de subir após um determinado momento. Pode haver várias soluções: coloque um segundo elemento de aquecimento do mesmo, ou aplique tensão nele 2 vezes mais (mas isso pode danificar o elemento de aquecimento), ou coloque um aquecedor com 2 vezes mais potência, ou despeje um líquido mais condutor de calor no sistema quando se trata de aquecimento líquidos. É bastante interessante que se você precisa manter a temperatura na região de 95-100 graus, então você não precisa nem colocar o regulador - coloque um aquecedor de baixa potência, corte-o ao máximo e pronto - após 300 segundos (300 segundos condicionais) você pode obter os 100 graus desejados.O problema com esse sistema é que se você abrir uma janela no inverno a menos de 40 graus, a temperatura cairá imediatamente e de forma bastante significativa, e o desempenho de tal sistema é muito baixo.
Vamos aumentar a seção de ganho em 2 vezes - é como instalar um segundo elemento de aquecimento do mesmo tipo ou adicionar outro tubo para reabastecer o tanque.

O gráfico acabou sendo também bastante indicativo - a temperatura atingiu 51 graus na verdade, chegou a 2 vezes mais rápido, mas chegou a 92 graus 4 vezes mais rápido. Não sei o quão próximo esse simulador está de processos reais, mas como a dependência especificada nele é exponencial, este é um comportamento completamente esperado do sistema, mas não consigo nem imaginar explicar da perspectiva de adicionar um segundo tubo e aumentar a taxa de enchimento em 4 vezes. A resposta de uma função linear seria mais previsível a um aumento no coeficiente, mas os sistemas reais raramente são lineares.