https://www.youtube.com/playlist?list=PLwr8DnSlIMg0KABru36pg4CvbfkhBofAi
De alguma forma, em Habré, encontrei um artigo bastante curioso "Mitos científicos e técnicos, parte 1. Por que os aviões voam?" ... O artigo descreve com alguns detalhes quais problemas surgem ao tentar explicar a elevação das asas em termos da lei de Bernoulli ou do modelo de elevação newtoniano . E embora o artigo ofereça outras explicações, eu ainda gostaria de me deter no modelo de Newton com mais detalhes. Sim, o modelo de Newton não está completo e tem suposições, mas fornece uma descrição mais precisa e intuitiva dos fenômenos do que a lei de Bernoulli.
— . - , , .
, . ? GitHub.
Computational Fluid Dynamics
, (Computational fluid dynamics, CFD), -.
, , 7- . 38 (“”), 40 (“ ‘’ ”) 41 (“ ‘’ ”). , - — . (, ) . , , .
— . , SpaceX . , , , . . , . , (Smoothed-particle hydrodynamics, SPH). : , , , . . , . , , (screen-space meshes, dual contouring, marching tetrahedra, metaballs). , .
Discrete Element Method
, .
(Discrete Element Method, DEM) , . , , , .
, ( X Y), . , . . — NASA . , STS-1 . Mission Anomalies.
DEM — (Discrete Collision Detection). .
Continuous Collision Detection (CCD), , . , , . . CCD , « ». , Unity Unreal .
Continuous Collision Detection
CCD . — . . — , , , . , “ ”
, DEM.
, , , , . , . , . .
National Geographic. , . , , .

( National Geographic)
. — . — . . .
https://youtu.be/cx8XbaQNnxw?t=2206
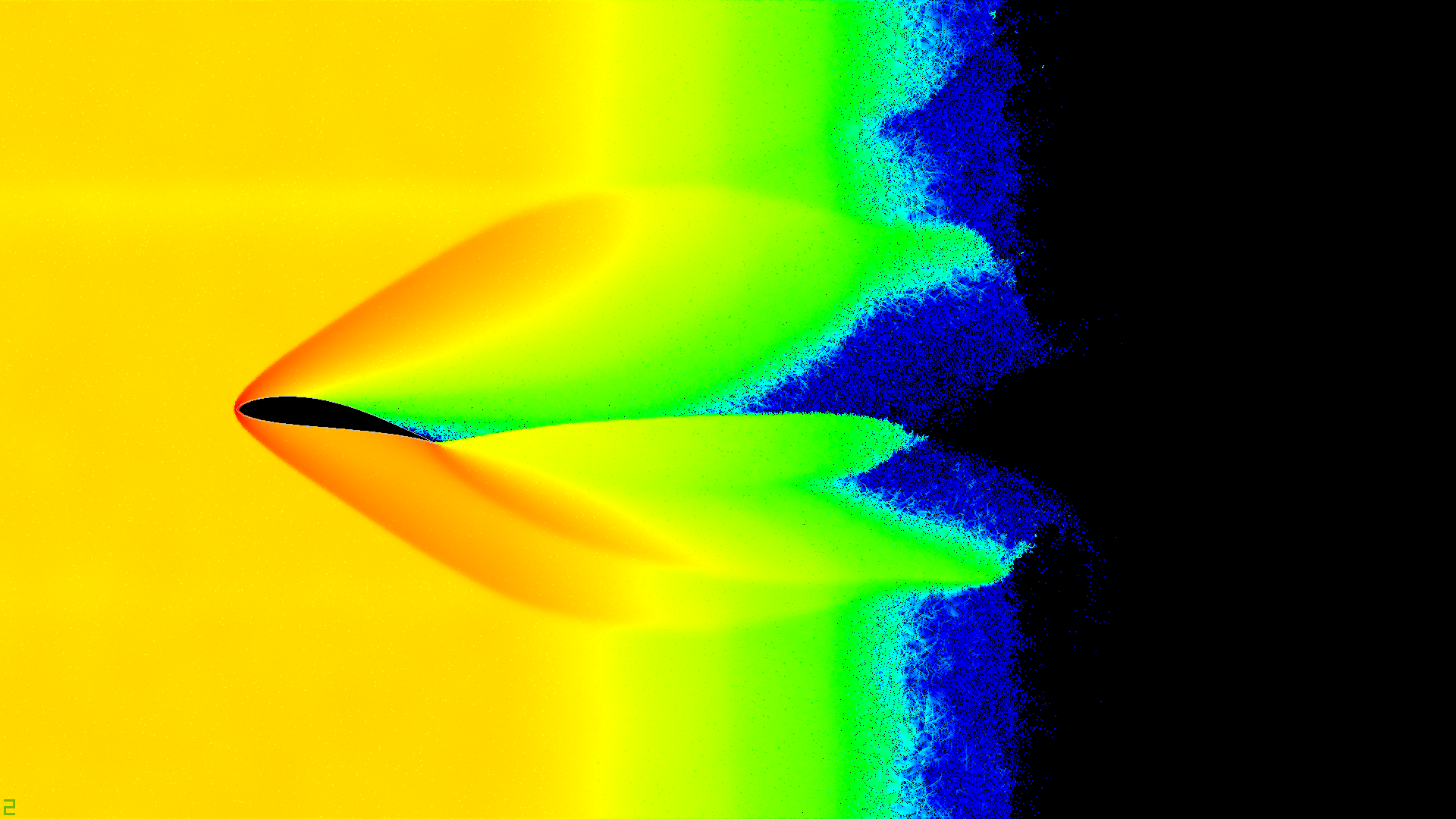
, . , . (heatmap) ( ) ( ) . .
.
( )
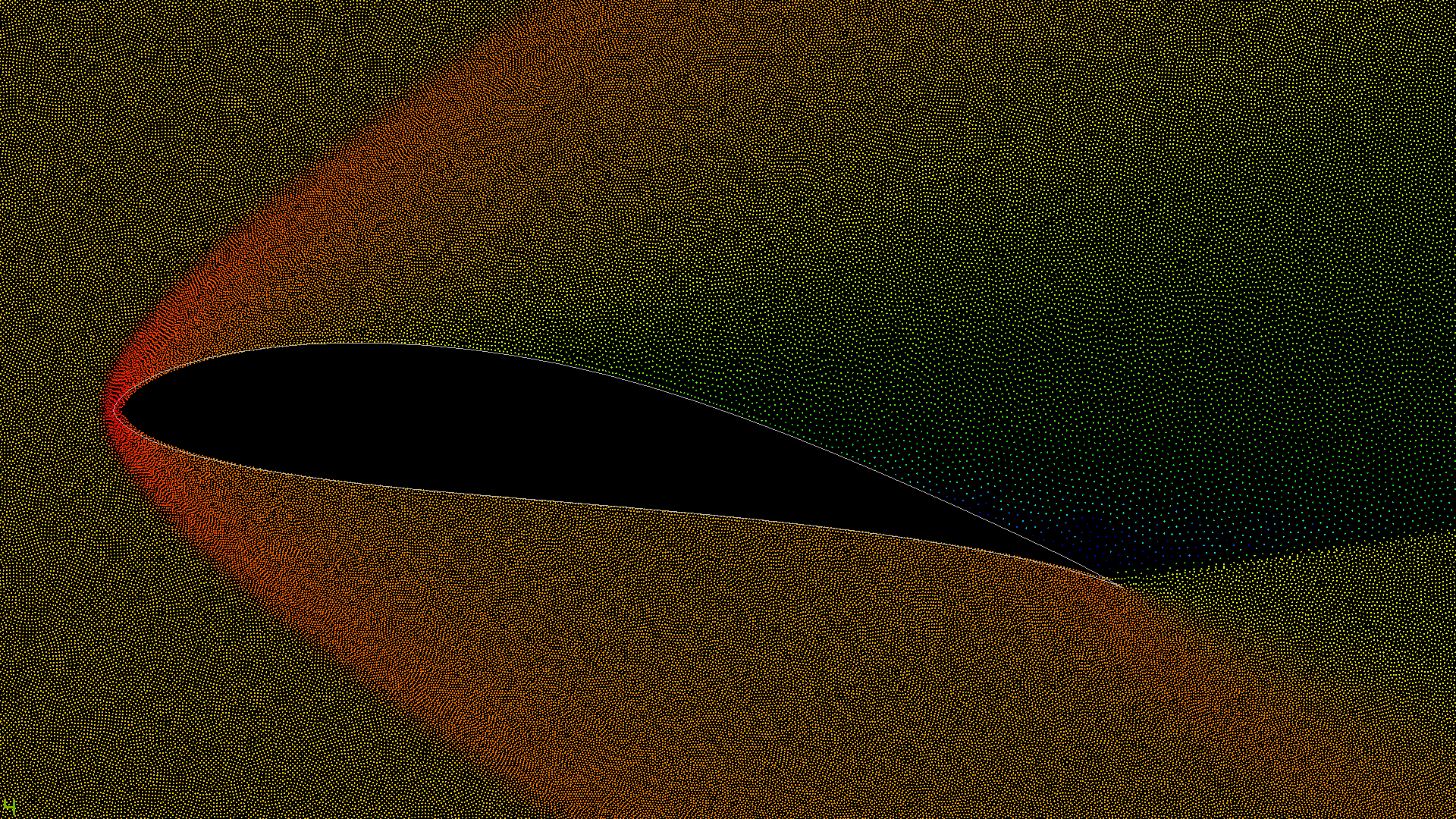
,
, . :
- .
- CPU CUDA.
. . CUDA- , , 16 .
. , , , , , .., . . .
, . (Ordinary Differential Equation, ODE). , — , — , . , .
, f, — .
'Differential Equation Basics' and 'Particle Dynamics' https://www.cs.cmu.edu/~baraff/sigcourse/
3Blue1Brown : 
https://www.youtube.com/playlist?list=PLZHQObOWTQDNPOjrT6KVlfJuKtYTftqH6
, — (Forward Euler). - 4- (RK4), , . RK4 , , . , , - . , , 'Differential Equation Basics' lecture notes, section 3, 'Adaptive Stepsizes'.
, , . , . .
float CSimulationCpu::ComputeMinDeltaTime(float requestedDt) const
{
auto rad = m_state.particleRad;
auto velBegin = m_curOdeState.cbegin() + m_state.particles;
auto velEnd = m_curOdeState.cend();
return std::transform_reduce(std::execution::par_unseq, velBegin, velEnd, requestedDt, [](const auto t1, const auto t2)
{
return std::min(t1, t2);
}, [&](const auto& v)
{
auto vel = glm::length(v);
auto radDt = rad / vel;
return radDt;
});
}
float CSimulationCpu::Update(float dt)
{
dt = ComputeMinDeltaTime(dt);
m_odeSolver->NextState(m_curOdeState, dt, m_nextOdeState);
ColorParticles(dt);
m_nextOdeState.swap(m_curOdeState);
return dt;
}— f, “ ”. CPU CUDA . , CPU , . CUDA , . . “ ”.
//CPU-
void CDerivativeSolver::Derive(const OdeState_t& curState, OdeState_t& outDerivative)
{
ResetForces();
BuildParticlesTree(curState);
ResolveParticleParticleCollisions(curState);
ResolveParticleWingCollisions(curState);
ParticleToWall(curState);
ApplyGravity();
BuildDerivative(curState, outDerivative);
}
//CUDA-
void CDerivativeSolver::Derive(const OdeState_t& curState, OdeState_t& outDerivative)
{
BuildParticlesTree(curState);
ReorderParticles(curState);
ResetParticlesState();
ResolveParticleParticleCollisions();
ResolveParticleWingCollisions();
ParticleToWall();
ApplyGravity();
BuildDerivative(curState, outDerivative);
}, , , — . 2’097’152 . - . , . — .
— Uniform Grid, . GPU “Chapter 32. Broad-Phase Collision Detection with CUDA”.

( Tero Karras, NVIDIA Corporation)
, . 9 (3x3) 27 (3x3x3) 2D 3D . — . , , RCU lock-free . Nvidia , malloc()/free() device , .
CppCon 2017: Fedor Pikus “Read, Copy, Update, then what? RCU for non-kernel programmers”
, :
- .
- RAM/VRAM, -, .
- , .
- .
- GPU, lock-free (https://youtu.be/86seb-iZCnI?t=2311, ).
, — BVH- Z-. , .
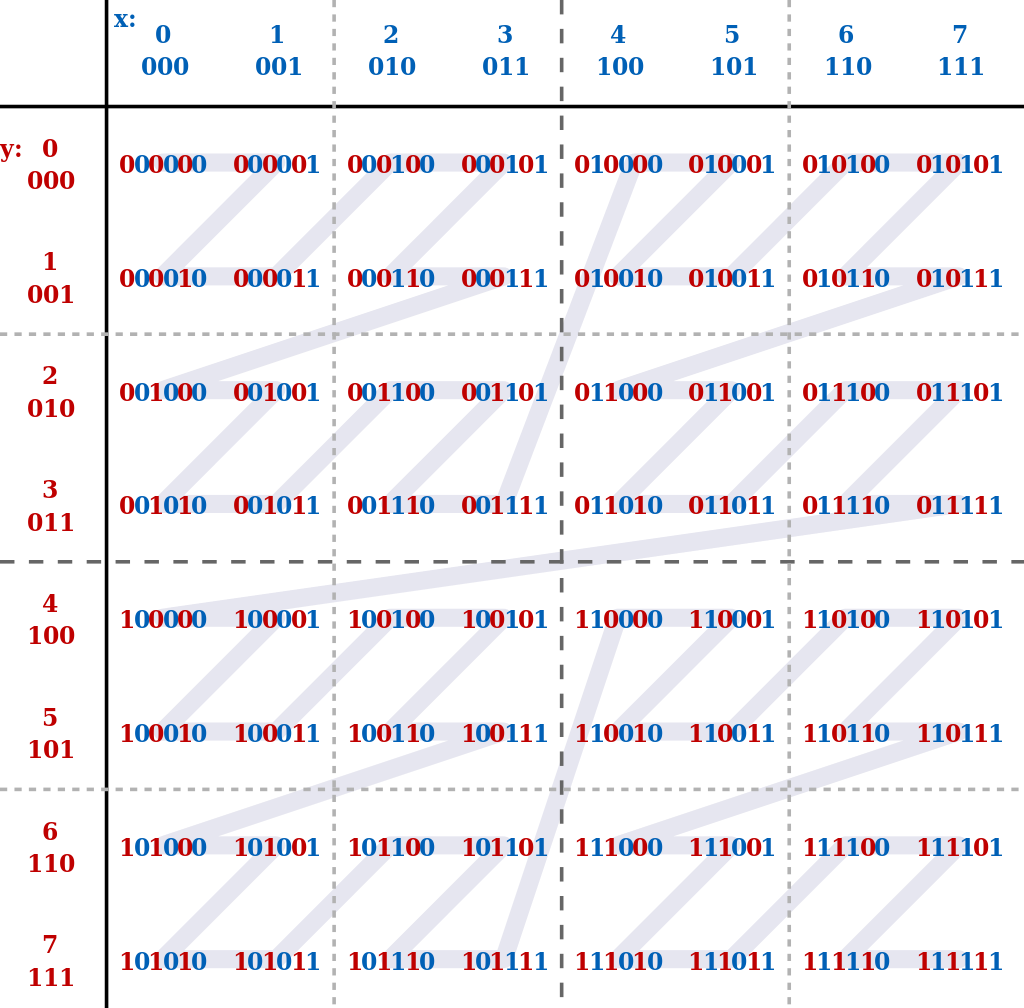
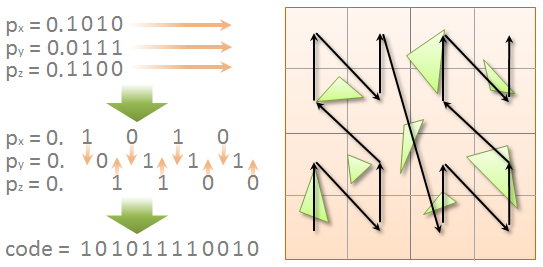
— Z-, .

Z- ( Wikipedia)
—
( Wikipedia)
, space-filling curve, , . 2D/3D , , , , , . . , , , , , .
, . , . , Tero Karras Nvidia, .
“Maximizing Parallelism in the Construction of BVHs, Octrees, and k-d Trees”.
:
- : https://developer.nvidia.com/blog/thinking-parallel-part-ii-tree-traversal-gpu/
- : https://developer.nvidia.com/blog/thinking-parallel-part-iii-tree-construction-gpu/
, . N , bounding box , , ( Z-). .
( Tero Karras, NVIDIA Corporation)
. , , , N N-1 . , . . , . , . .
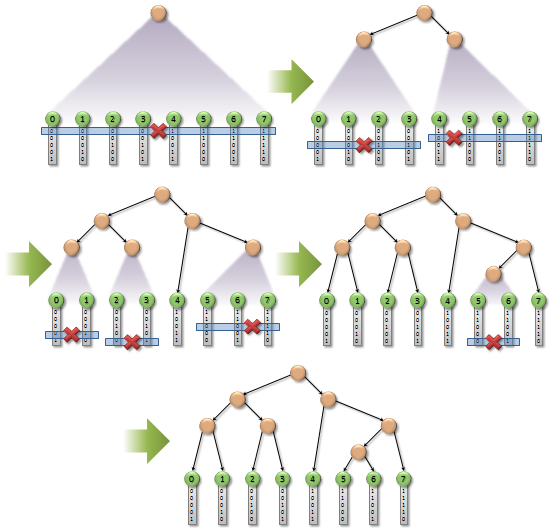
( Tero Karras, NVIDIA Corporation)
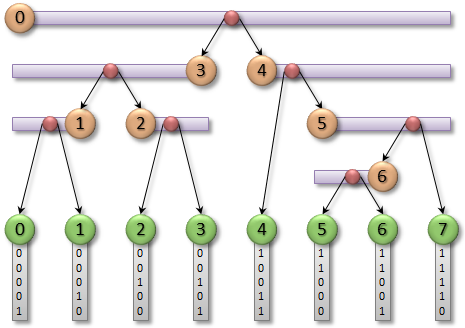
( Tero Karras, NVIDIA Corporation)
, , BVH-.

BVH- ( Tero Karras, NVIDIA Corporation)
N , , . , , , . atomicExch() 1. , . 0, . , , . . 1, , , .
.
“-” “- ”.
“-” , , “” , . Tero Karras. , A-B B-A , . . (rightmost leaf), . , rightmost(N2) = 4, rightmost(N3) = 8. , , , O6, , N2. rightmost, , O6 N2. O6 N2. , , N2, N3. , O6 , , N2.
:
template<typename TDeviceCollisionResponseSolver, size_t kTreeStackSize>
void CMortonTree::TraverseReflexive(const TDeviceCollisionResponseSolver& solver);“- ” :
template<typename TDeviceCollisionResponseSolver, size_t kTreeStackSize>
void CMortonTree::Traverse(const thrust::device_vector<SBoundingBox>& objects, const TDeviceCollisionResponseSolver& solver);TDeviceCollisionResponseSolver — , :
struct Solver
{
struct SDeviceSideSolver
{
...
__device__ SDeviceSideSolver(...);
__device__ void OnPreTraversal(TIndex curId);
__device__ void OnCollisionDetected(TIndex leafId);
__device__ void OnPostTraversal();
};
Solver(...);
__device__ SDeviceSideSolver Create();
}; , , . Create(). OnPreTraversal, . - , OnCollisionDetected . . OnPostTraversal.
. -. , Tero Karras. . NxO, N — , O — . , . . , (coalesced memory access). , . , .
struct SParticleParticleCollisionSolver
{
struct SDeviceSideSolver
{
CDerivativeSolver::SIntermediateSimState& simState;
TIndex curIdx;
float2 pos1;
float2 vel1;
float2 totalForce;
float totalPressure;
__device__ SDeviceSideSolver(CDerivativeSolver::SIntermediateSimState& state) : simState(state)
{
}
__device__ void OnPreTraversal(TIndex curLeafIdx)
{
curIdx = curLeafIdx;
pos1 = simState.pos[curLeafIdx];
vel1 = simState.vel[curLeafIdx];
totalForce = make_float2(0.0f);
totalPressure = 0.0f;
}
__device__ void OnCollisionDetected(TIndex anotherLeafIdx)
{
const auto pos2 = simState.pos[anotherLeafIdx];
const auto deltaPos = pos2 - pos1;
const auto distanceSq = dot(deltaPos, deltaPos);
if (distanceSq > simState.diameterSq || distanceSq < 1e-8f)
return;
const auto vel2 = simState.vel[anotherLeafIdx];
auto dist = sqrtf(distanceSq);
auto dir = deltaPos / dist;
auto springLen = simState.diameter - dist;
auto force = SpringDamper(dir, vel1, vel2, springLen);
auto pressure = length(force);
totalForce += force;
totalPressure += pressure;
atomicAdd(&simState.force[anotherLeafIdx].x, -force.x);
atomicAdd(&simState.force[anotherLeafIdx].y, -force.y);
atomicAdd(&simState.pressure[anotherLeafIdx], pressure);
}
__device__ void OnPostTraversal()
{
atomicAdd(&simState.force[curIdx].x, totalForce.x);
atomicAdd(&simState.force[curIdx].y, totalForce.y);
atomicAdd(&simState.pressure[curIdx], totalPressure);
}
};
CDerivativeSolver::SIntermediateSimState simState;
SParticleParticleCollisionSolver(const CDerivativeSolver::SIntermediateSimState& state) : simState(state)
{
}
__device__ SDeviceSideSolver Create()
{
return SDeviceSideSolver(simState);
}
};
void CDerivativeSolver::ResolveParticleParticleCollisions()
{
m_particlesTree.TraverseReflexive<SParticleParticleCollisionSolver, 24>(SParticleParticleCollisionSolver(m_particles.GetSimState()));
CudaCheckError();
}, , OnCollistionDetected . : - A, B, C D, Z , :
| lock-step # | Thread #1 | Thread #2 | Thread #3 |
|---|---|---|---|
| 1 | OnCollisionDetected
A <-> C |
OnCollisionDetected
B <-> C |
OnCollisionDetected
C <-> D |
| 2 | OnCollisionDetected
A <-> D |
OnCollisionDetected
B <-> D |
INACTIVE |
| 3 | OnPostTraversal(1) | OnPostTraversal(2) | OnPostTraversal(3) |
, 1 2 #1 #2 atomicAdd C D OnCollistionDetected. atomic .
Volta, Nvidia warp-vote . match_any warp, , .

match_any match_all
, warp shuffle .
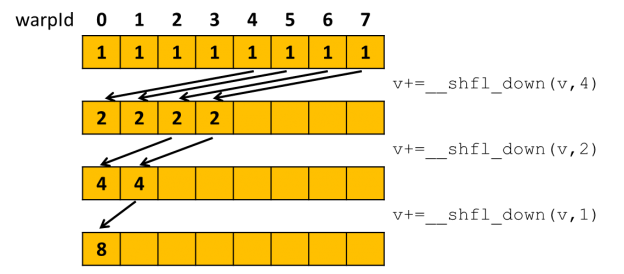
Warp-wide
, . SM . , Pascal (1080 Ti) , . , , . , atomic , Arithmetic Workload . Volta Turing . , RTX 2060 , atomic . “ ”.
, , .
SoA
Structure of Arrays — , .
. , , SoA:
typedef uint32_t TIndex;
struct STreeNodeSoA
{
const TIndex leafs;
int* __restrict__ atomicVisits;
TIndex* __restrict__ parents;
TIndex* __restrict__ lefts;
TIndex* __restrict__ rights;
TIndex* __restrict__ rightmosts;
SBoundingBox* __restrict__ boxes;
const uint32_t* __restrict__ sortedMortonCodes;
};:
struct SIntermediateSimState
{
const TIndex particles;
const float particleRad;
const float diameter;
const float diameterSq;
float2* __restrict__ pos;
float2* __restrict__ vel;
float2* __restrict__ force;
float* __restrict__ pressure;
}; , bounding box’ SoA , . Array of Structures (AoS):
struct SBoundingBox
{
float2 min;
float2 max;
};
struct SBoundingBoxesAoS
{
const size_t count;
SBoundingBox* __restrict__ boxes;
}; , , . , . . , uncoalesced memory access.
GPU. coalesced memory access, . , . SpaceX: https://youtu.be/vYA0f6R5KAI?t=1939 ( ).

( SpaceX)
50% : 8 FPS 12 FPS .
Shared Memory
, . , — . SM , uncoalesced. , Shared Memory Streaming Multiprocessor’.
__device__ void traverseIterative( CollisionList& list,
BVH& bvh,
AABB& queryAABB,
int queryObjectIdx)
{
// Allocate traversal stack from thread-local memory,
// and push NULL to indicate that there are no postponed nodes.
NodePtr stack[64]; //<----------------------------
NodePtr* stackPtr = stack;
*stackPtr++ = NULL; // push
// Traverse nodes starting from the root.
NodePtr node = bvh.getRoot();
do
{
// Check each child node for overlap.
NodePtr childL = bvh.getLeftChild(node);
NodePtr childR = bvh.getRightChild(node);
bool overlapL = ( checkOverlap(queryAABB,
bvh.getAABB(childL)) );
bool overlapR = ( checkOverlap(queryAABB,
bvh.getAABB(childR)) );
// Query overlaps a leaf node => report collision.
if (overlapL && bvh.isLeaf(childL))
list.add(queryObjectIdx, bvh.getObjectIdx(childL));
if (overlapR && bvh.isLeaf(childR))
list.add(queryObjectIdx, bvh.getObjectIdx(childR));
// Query overlaps an internal node => traverse.
bool traverseL = (overlapL && !bvh.isLeaf(childL));
bool traverseR = (overlapR && !bvh.isLeaf(childR));
if (!traverseL && !traverseR)
node = *--stackPtr; // pop
else
{
node = (traverseL) ? childL : childR;
if (traverseL && traverseR)
*stackPtr++ = childR; // push
}
}
while (node != NULL);
}template<typename TDeviceCollisionResponseSolver, size_t kTreeStackSize, size_t kWarpSize = 32>
__global__ void TraverseMortonTreeKernel(const CMortonTree::STreeNodeSoA treeInfo, const SBoundingBoxesAoS externalObjects, TDeviceCollisionResponseSolver solver)
{
const auto threadId = blockIdx.x * blockDim.x + threadIdx.x;
if (threadId >= externalObjects.count)
return;
const auto objectBox = externalObjects.boxes[threadId];
const auto internalCount = treeInfo.leafs - 1;
__shared__ TIndex stack[kTreeStackSize][kWarpSize]; //
unsigned top = 0;
stack[top][threadIdx.x] = 0;
auto deviceSideSolver = solver.Create();
deviceSideSolver.OnPreTraversal(threadId);
while (top < kTreeStackSize) //top == -1 also covered
{
auto cur = stack[top--][threadIdx.x];
if (!treeInfo.boxes[cur].Overlaps(objectBox))
continue;
if (cur < internalCount)
{
stack[++top][threadIdx.x] = treeInfo.lefts[cur];
if (top + 1 < kTreeStackSize)
stack[++top][threadIdx.x] = treeInfo.rights[cur];
else
printf("stack size exceeded\n");
continue;
}
deviceSideSolver.OnCollisionDetected(cur - internalCount);
}
deviceSideSolver.OnPostTraversal();
}Shared Memory 43%: 14 FPS 20 FPS. :
https://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#device-memory-accesses
, — 1080 Ti Pascal. , , . 20- . .

20- RTX . .
, , . . :
.
atomic- lock-free . , (Out-of-order execution), , . lock-free . , , , . -, , , C++ . std::memory_order.
__device__ void CMortonTree::STreeNodeSoA::BottomToTopInitialization(size_t leafId)
{
auto cur = leafs - 1 + leafId;
auto curBox = boxes[cur];
while (cur != 0)
{
auto parent = parents[cur];
//1. atomic
auto visited = atomicExch(&atomicVisits[parent], 1);
if (!visited)
return;
TIndex siblingIndex;
SBoundingBox siblingBox;
TIndex rightmostIndex;
TIndex rightmostChild;
auto leftParentChild = lefts[parent];
if (leftParentChild == cur)
{
auto rightParentChild = rights[parent];
siblingIndex = rightParentChild;
rightmostIndex = rightParentChild;
}
else
{
siblingIndex = leftParentChild;
rightmostIndex = cur;
}
siblingBox = boxes[siblingIndex];
rightmostChild = rightmosts[rightmostIndex];
SBoundingBox parentBox = SBoundingBox::ExpandBox(curBox, siblingBox);
boxes[parent] = parentBox;
rightmosts[parent] = rightmostChild;
cur = parent;
curBox = parentBox;
//2. .
//
__threadfence();
}
}, , BVH , . , . , SIMT ( Volta SIMT Model Starvation-Free Algorithms) Nvidia Volta Out-of-order execution. , , atomicExch(), .. , Turing . , , , , . data race.
thrust::device_vector
, thurst::device_vector . resize() GPU cudaDeviceSynchronize(). , . , . , , . — . — (reduce, sum, min, max) , . Cuda UnBound (CUB) . , thrust , .
, , .
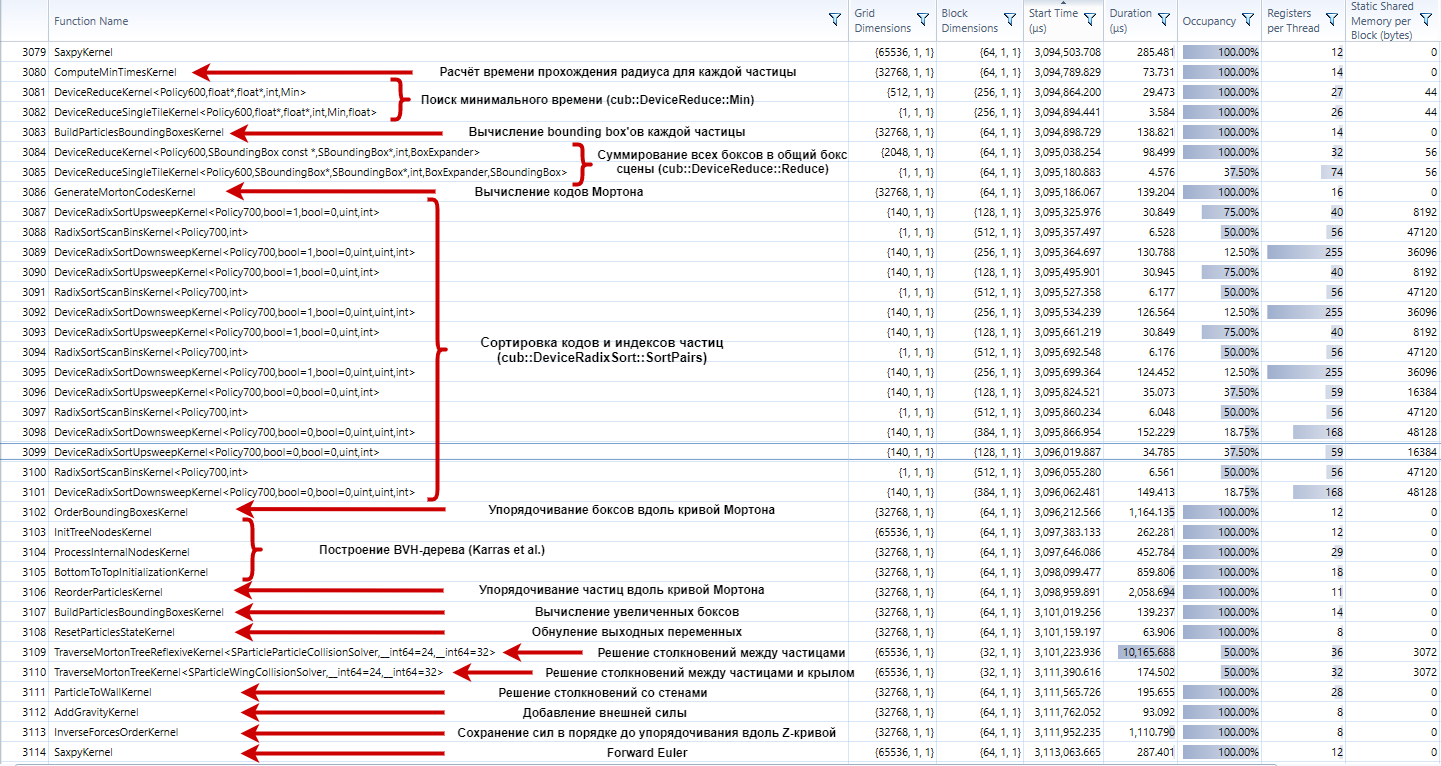
,
, GPU -, . , . “ ”, APOD .
, , , , GPU.
Se você gostaria de começar a aprender CUDA, mas não sabe por onde começar, há um excelente curso no Youtube da Udacity “Intro to Parallel Programming”. Eu recomendo revisar.
https://www.youtube.com/playlist?list=PLAwxTw4SYaPnFKojVQrmyOGFCqHTxfdv2
Finalmente, mais algumas simulações de vídeo:
Versão da CPU, 8 threads, 131'072 partículas
Versão CUDA, partículas 4.2M, simulação de 30 minutos