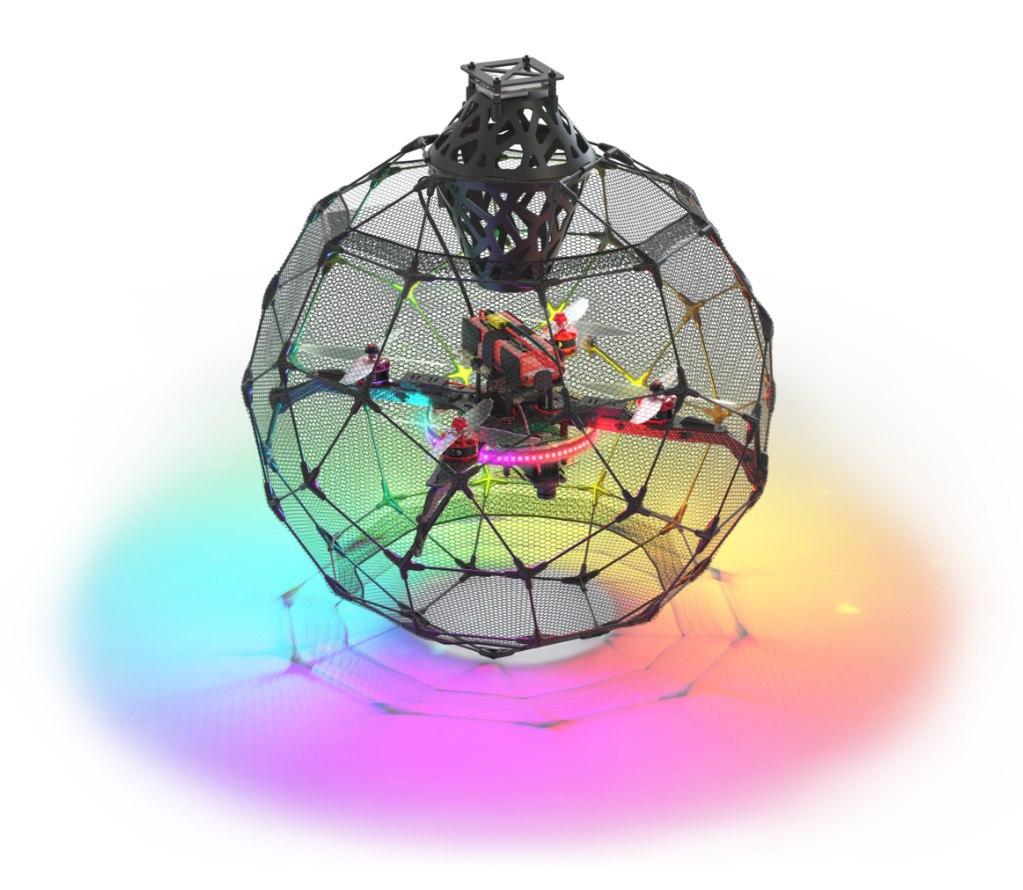
Muito polêmico, muito incomum, muito estranho, mas funciona! No cruzamento da arquitetura, robótica colaborativa e veículos aéreos não tripulados. Apresentando: Tensodrone ™.

Tensodrone (Tensodron) - veículo aéreo não tripulado (VANT) de tipo multirrotor de novo desenho com proteção contra colisões, feita com base no princípio da tensegridade. Esta abordagem melhora a resistência ao impacto com menos peso, combinando a gaiola de proteção e o design da estrutura estrutural.
O projeto é um exemplo vivo da interação de várias equipes do NTI Competence Centre na direção de "Tecnologias de Componentes de Robótica e Mecatrônica" com base na Universidade de Innopolis.
Drones estão caindo

Fonte
Só porque eles voam. Sistemas de controle, motores, sensores, pilotos automáticos, computadores de bordo e software - os desenvolvedores tentam fazer tudo isso da forma mais confiável possível, mas o risco de bater o helicóptero permanece. E se este for um protótipo, então você precisa fazer vários (peças ou dezenas?) De uma vez para depuração. Além de fatores internos, obviamente, permanecem fatores externos: vento, obstáculos passivos, influência ativa.
Quase ninguém vai discutir, os drones caem, colidem, tombam.
Você pode tentar evitar isso, você pode se preparar para isso. O que é melhor? Depende do desenvolvedor, usuário e legislador.
Sou a favor de ambas as abordagens combinadas. Mas neste artigo, vamos nos concentrar em como evitar as consequências de uma queda ou colisão de um UAV.
Estruturas de proteção
A abordagem mais direta para evitar as consequências de uma queda ou colisão de um UAV é uma gaiola de proteção e outras estruturas de proteção. Existem duas tarefas aqui - proteger o drone de danos e proteger o ambiente onde o drone opera e as pessoas nele contidas.
A versão básica do projeto, que tem mais probabilidade de proteger as pessoas do drone, é a proteção da hélice.

Drone AR.Drone 2.0 com proteções de hélice. Fonte
Há também soluções divertidas inspiradas em origami com proteções de hélice flexíveis e dobráveis (e até designs de quadros) desenvolvidas pela equipe do Professor Dario Floreano na EPFL.
O projeto predominante para proteger o próprio drone (e ao mesmo tempo as pessoas dele) é uma gaiola de proteção. O próprio quadricóptero está dentro da gaiola.
DroneClover from the Russian COEX A
empresa russa COEX fabrica drones para fins de treinamento, que por padrão possuem proteções de hélice e, opcionalmente, uma gaiola de proteção.
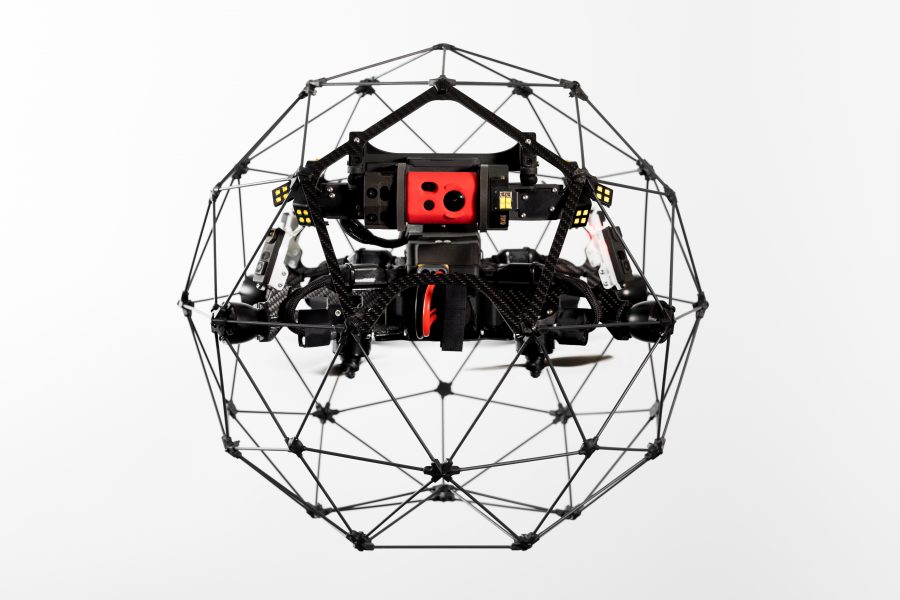
Drone Flyability ELIOS
Swiss (Suíça - capital dronostroeniya?) Empresa de Flyability - produz talvez o helicóptero ELIOS de maior sucesso comercial com uma gaiola de proteção para realizar inspeções dentro das instalações. A originalidade do desenho consiste em fixar a gaiola de proteção ao quadro do helicóptero sobre uma suspensão móvel com possibilidade de estabilização.

Drone Dronistics
A startup Dronistics da EPFL (Suíça novamente, do grupo Dario Floreano) oferece um drone com uma gaiola dobrável para a entrega segura de mercadorias.
Ainda pausa

A desvantagem de tais drones é o aumento da massa da estrutura - você precisa carregar uma gaiola de proteção e acessórios para o UAV. O desejo de reduzir o peso da estrutura protetora leva a uma diminuição em sua resistência.
Drones com geometria variável
Outra direção relacionada à ideia de um drone robusto (e não apenas) é drones dobráveis e drones com geometria variável (dobrável e metamorfose). Isso se refere à capacidade do drone de alterar sua geometria durante o vôo. Estruturas dobráveis são feitas para evitar danos ao drone (por exemplo, o drone pode "amassar" antes do impacto), e o drone pode, por exemplo, ser dobrado em um tamanho compacto para voar através de janelas estreitas.
Você pode ter visto um vídeo legal de drone de geometria variável da Suíça (sim, ETH + EPFL + UZH novamente). Essa ideia também é interessante e próxima de nós, contarei o porquê mais tarde.
Drone com geometria variável
Tensegridade
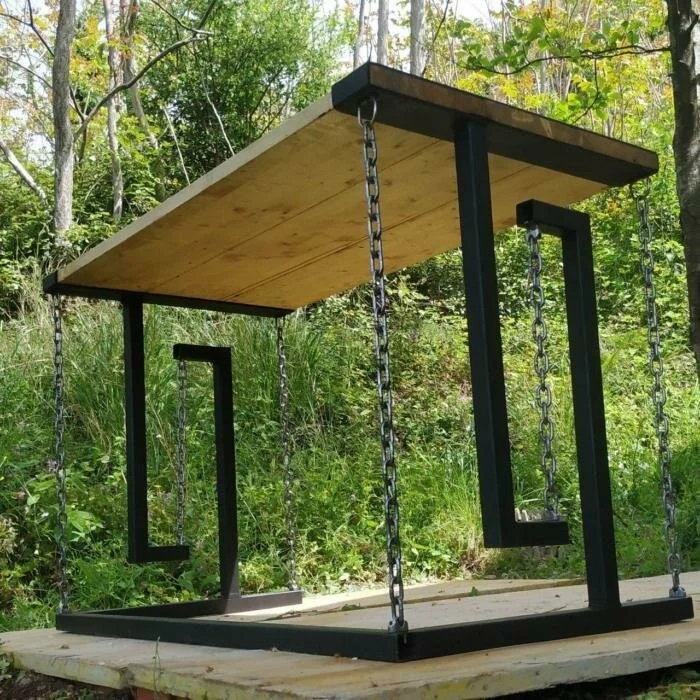
Tabela de tensegridade. A fonte da
Tensegridade é a capacidade das estruturas de enquadramento de explorar as interações de elementos sólidos compressivos com compostos de tração para garantir que cada elemento opere com o máximo de eficiência e economia ( Wiki ). O termo é relativamente novo, surgiu na década de 1960. A mesa da imagem acima está (ou pende) sem pernas apenas devido ao princípio da tensegridade.
Existem muitas aplicações modernas dessa abordagem na arquitetura, de onde surgiu, principalmente no projeto de pontes.

A maior ponte de Tensegridade do mundo, Austrália. Uma fonte
Usos alternativos :)
Tensegridade em robótica
Uma das áreas mais antigas da robótica - os manipuladores industriais - vive agora uma nova etapa de seu desenvolvimento associada aos chamados. robótica colaborativa. Na fala de especialistas da área, dois termos podem ser ouvidos com grande frequência - rigidez e complacência.
Em robótica industrial, o termo conformidade se refere a flexibilidade e conformidade. Um robô rígido não compatível é um dispositivo que funciona independentemente das forças externas que atuam sobre ele. O efetor final do robô sempre seguirá exatamente o mesmo caminho. Por outro lado, o efetor final de um robô compatível pode se mover ao longo de diferentes trajetórias para completar uma tarefa e aplicar diferentes forças ao objeto. Por exemplo, um robô pode pegar um ovo sem esmagá-lo. A rigidez controlada está no cerne da robótica colaborativa.
As ideias para usar tensegridade na robótica vêm da robótica colaborativa e “suave”. As estruturas de tensegridade são leves, resistentes a impactos e permitem controlar sua rigidez (conformidade) e configuração (forma).
O exemplo mais famoso da aplicação de tensegridade em robótica é o Super Ball Bot da NASA, um robô terrestre dobrável, que foi planejado para ser usado para estudar superfícies planetárias. Graças à estrutura esférica de cabos e cordas, o robô pode resistir a uma queda de grande altura quando é lançado no planeta de uma nave espacial. Uma vez na superfície, o robô pode rolar em qualquer direção controlando o comprimento dos cabos e / ou hastes.
IEEE Spectrum Video on NASA SUPERball v2
Robôs de Tensegridade na Innopolis University
Na UI, desenvolvemos um aparato matemático para modelar, projetar e controlar sistemas robóticos com estruturas acopladas a tensões com rigidez variável (isto é tensegridade). Este é um trabalho fundamental que pode ser encontrado em uma ampla variedade de robôs, como manipuladores de tensegridade ou robôs ambulantes.
Manipulador de
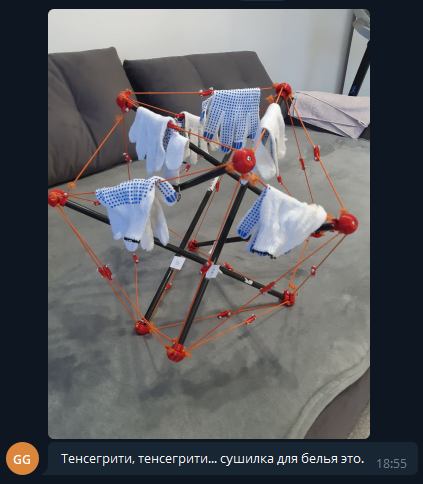
tensegridade, graduado e pesquisador da UI Oleg Balakhnov Oleg foi o primeiro a começar a prototipar robôs de tensegridade conosco - primeiro a partir de palitos de madeira e elásticos. A foto da construção dos palitos de sushi, talvez, também guarda a história dos chats.
Tensegrity Vibrobot
-
-
Efeito sinérgico

Você provavelmente já entendeu
Eu tenho um drone, tenho tensegridade. Ugh! (Tensodrone)
Uma vez em nossa garagem, passei por um desenho estranho e atraente:
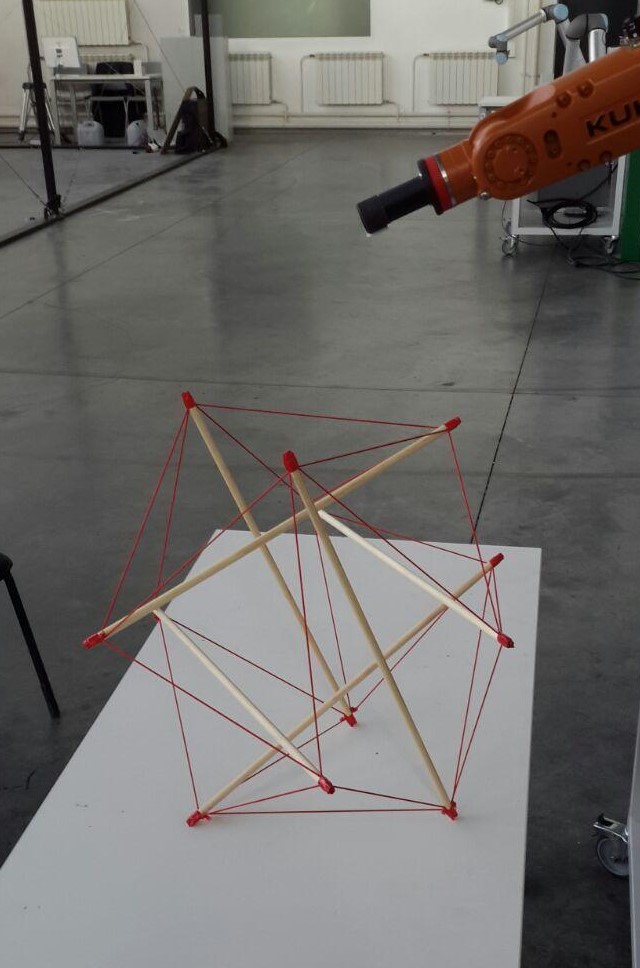
perguntei: "O que é isso?" Disseram-me: "uma estrutura impossível de matar - deixe-a cair, mas ela não quebra."
Eu quebrei (na verdade apenas encolhi - mudei de forma porque os elásticos estavam soltos e desalinhados). Mas precisamos desse design para drones! E começamos uma experiência aventureira.
Vídeo de teste de sobrevivência de tensegridade
Um teste mais difícil
Squishy robotics — , - , ,
Squishy robotics — , - , ,
Aventura

Sergey aprova o experimento aventureiro. Jeff Bezos também é
Sergey Savin - um pesquisador sênior, professor associado, um cientista sério com Ph.D. aos 25 anos e várias publicações de classificação. Ele é um dos fundadores da Tensegrity Robotics na UI, e recebeu várias bolsas para desenvolver Tensegrity em Robótica.
Igor está considerando uma ideia
Dmitry, Oleg e Haney coletam o primeiro tencodron (parece algo). Dmitry DevittGigaFlopsis- pesquisador e pós-graduando da Universidade e que aplicou as mais modernas tecnologias - tubos de carbono e fios kevlar, impressão 3D com carbono e plástico macio, implementou tudo e fez voar.

O processo de montagem do tensodron

Ura. aconteceu!
Moscas!
Dmitry também é o primeiro ator depois do tensodron nos vídeos épicos de seus voos. Taxa:
Um jogo de dois atores se estrelando. Vídeo por DeluuusiOn
Mais sobre a construção de protótipos
O design do primeiro drone protótipo resultou da seguinte maneira:
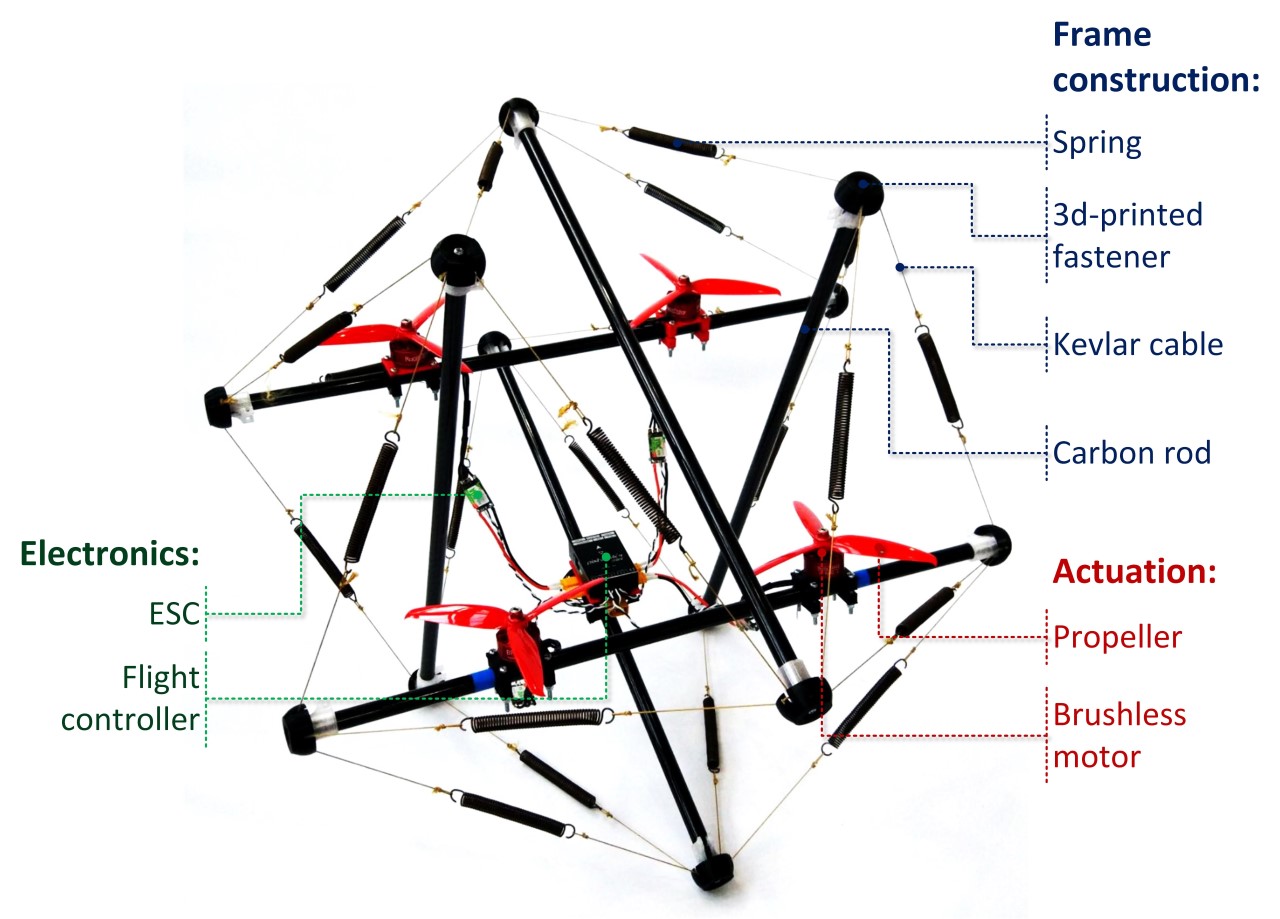
O design do protótipo do tensodron da Universidade de Innopolis
O design básico de seis hastes do Tensegrity foi usado. Ao contrário dos quadricópteros rígidos, temos dois pares de motores de hélice montados em feixes diferentes. Além disso, nenhum deles está rigidamente conectado ao piloto automático, que está localizado no feixe inferior.
Os componentes eletrônicos e eletromecânicos integrados do protótipo do drone incluem:
- Piloto automático CUAV Pixhawk v5 mini;
- Bateria 3s 1400mAh;
- Regulador Racerstar REV35 35A BLheliS 3-6S ESC;
- Motores de 2300KV da Racerstar Racing Edition BR2205;
- Sensores IMU MPU9250.
Os cabos são feitos de fibra Kevlar com molas personalizadas. As hastes são feitas de tubos de fibra de carbono. As extremidades e outras peças pequenas são impressas em 3D.
Problemas de gestão
O principal problema de controle em comparação com um drone convencional são as vibrações, que, em primeiro lugar, são maiores em amplitude e, em segundo lugar, são diferentes para o controlador e diferentes motores, porque eles são instalados em vigas diferentes (embora isso também possa ser uma vantagem - isolamento de vibração).
Primeiros testes Gimbal Tensodron: vibração (desculpe pelo vídeo vertical)
Os primeiros testes do tensodron em vôo: vibração
Nós não estamos sozinhos
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
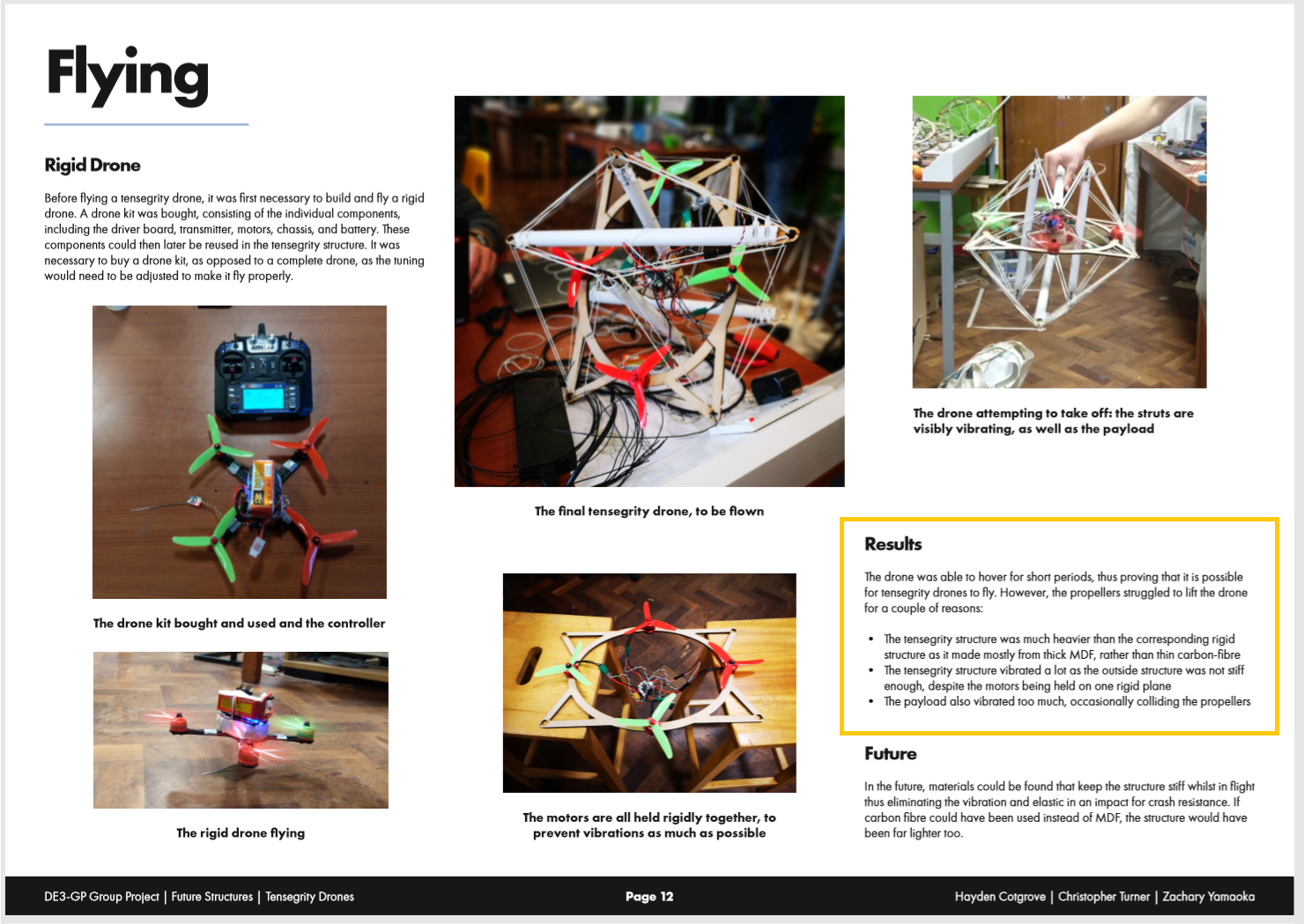
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Resolvemos esses problemas de dois lados - melhorando o projeto para reduzir as vibrações durante o voo e desenvolvendo algoritmos de estimativa de estado e controle para suprimir vibrações e melhor controle, incluindo a consideração de dados adicionais de sensores IMU nos feixes e um modelo dinâmico da estrutura de tensegridade.
Queda no chão seguida de decolagem, dentro de casa (sem instalação)
Mais alguns vídeos de teste
, , . , .. .
( )
( )
Qual é o próximo?
Pesquisa
Ainda há muitas coisas interessantes pela frente:
Inscrição
Agora, essa coisa voa sozinha em uma determinada missão (incluindo GPS na rua e em ambientes fechados - usaremos odometria visual). Para nós, mais aplicações para inspeção de instalações é óbvio.
Exceto para controle e forma de baixo nível, o tensodron é um drone regular, integramos nossos algoritmos de planejamento de movimento a ele para exploração autônoma e prevenção de obstáculos.
Um exemplo de execução de uma inspeção automática. Projeto de mestrado de Victor Massague, nosso graduado e, em um futuro próximo, esperançosamente um funcionário de Barcelona
E novamente pesquisa
O potencial do projeto do drone Tensegrity é muito maior do que um simples drone.
Lembra do Drone dobrável do vídeo acima? E o SUPERball ?
Então, se você mudar ativamente os comprimentos das hastes ou a tensão dos cabos do drone de tensegridade, você pode controlar sua configuração (ou, mais simplesmente, a forma)!
Acontece que o Tensodrone Morphing Dobrável. Estamos realizando ativamente pesquisas nesta área.
Tensodron de geometria variável da Innopolis University (conceito)

O uso de Tensegrity para uma aeronave abre novos desafios de pesquisa. O protótipo do projeto já mostra que a ideia funciona e pode ser usada para proteger o VANT.