
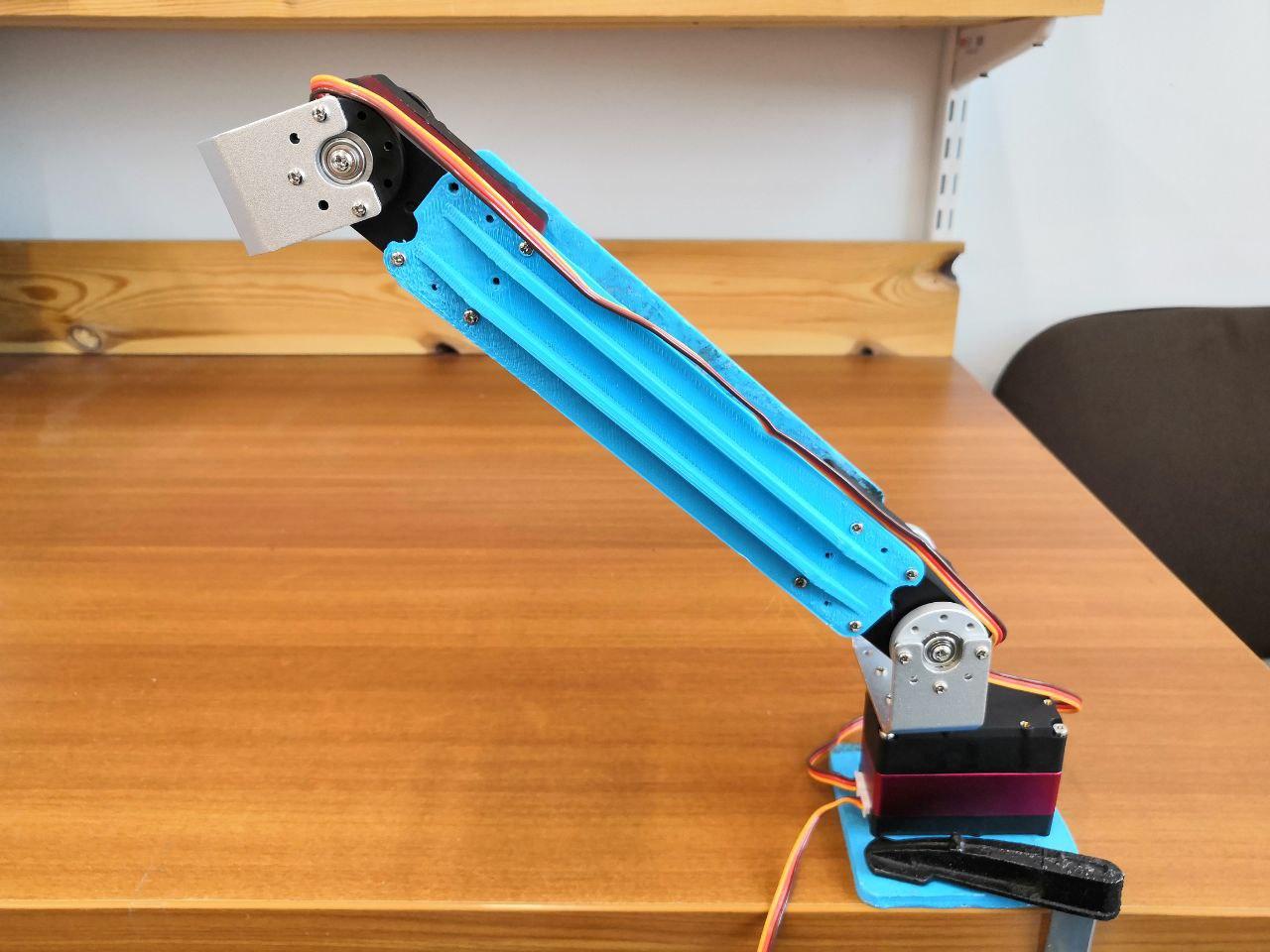
Estamos desenvolvendo um robô para coletar bolas de golfe . Precisamos de um servo para abrir a escotilha. Testamos um grande número e hoje queremos falar sobre um Dynamixel analógico muito interessante, que é mais da metade do preço.
Hoje, um moderno servoconversor modelo representa um dispositivo completo em um único alojamento (motor com caixa de engrenagens e placa de controle). A maneira mais comum de controlar servos modelo é o protocolo PWM, a posição do servomotor é determinada pela largura do pulso, a presença de pulsos serve como um sinal de ativação. Essa abordagem permite simplificar a eletrônica o máximo possível, mas isso não ocorre sem seus problemas.
Primeiramente, não há feedback e também há problemas com a conexão a um PC com plataformas semelhantes (geralmente é necessário um Arduino ou outro microcontrolador como interlayer). Em segundo lugar, devido às peculiaridades do protocolo, a precisão do posicionamento raramente excede 1 \ 256 por faixa servo (270 ou 180 graus). Em terceiro lugar, não é possível detectar falhas mecânicas e superaquecimento. Todos esses problemas levam ao fato de que esses servos não podem ser usados em tarefas nas quais é necessário controlar consistentemente um grande número de graus com alta precisão.
Para resolver esses problemas, você precisa usar um barramento de dados comum. Uma solução completa e popular são os conhecidos servomotores Dynamixel. O protocolo é compatível com o uart regular (é necessário um esquema de negociação simples). Pode ser conectado a qualquer computador com essa porta (Arduino, Raspberry, pc). Essa abordagem permite sincronizar os movimentos dos servoconversores, receber feedback, monitorar o desempenho (erros, temperaturas) e ajustar o controlador PID. A fiação também é simplificada, agora é possível montar servos em série. O fabricante possui uma ampla gama de modelos para todos os gostos e cores. No entanto, o preço permanece bem acima dos servoconversores PWM convencionais.
E então nós temos um servo drive da produção doméstica IlyushaTotalmente compatível com o protocolo Dynamixel v1. Nós nos perguntamos que tipo de animal era e o que poderia fazer. Decidimos testá-lo e o que veio dele, contaremos abaixo.
Parâmetros básicos
Tensão de alimentação 6-15V
Torque máximo 60kg * cm
Resolução do codificador 16384 papagaio 360 graus
Proteção contra superaquecimento
Proteção de corrente
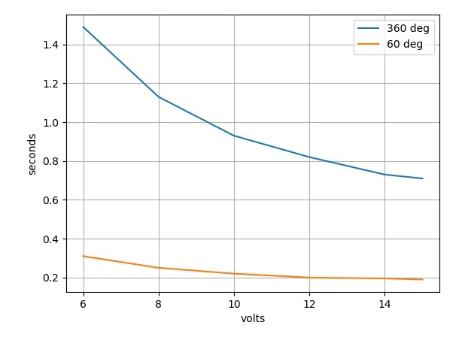
Primeiro, mediremos a velocidade de rotação sem carga para uma faixa de tensões
6, 10, 12, 14, 15 V
E agora mediremos o máximo momento, com os mesmos valores de tensão:
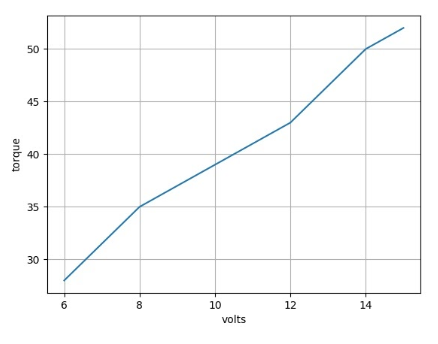
tempo de transição para um movimento de 60 graus.
E agora a coisa mais desagradável é a folga na caixa de velocidades.
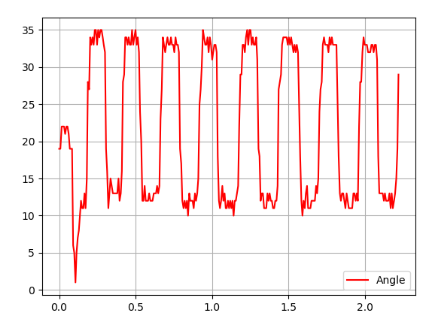
A partir disso, podemos concluir que a folga é de ~ 0,5 graus:

As características são adequadas para nossos propósitos, considerando que o preço é duas vezes mais baixo, decidimos usar esses servos em nosso dispositivo.