
O acelerômetro mais simples, como funciona?
Um acelerômetro é um dispositivo que mede a projeção da aceleração aparente (a diferença entre a aceleração real do objeto e a aceleração gravitacional). Como funciona pode ser explicado usando um modelo simples.
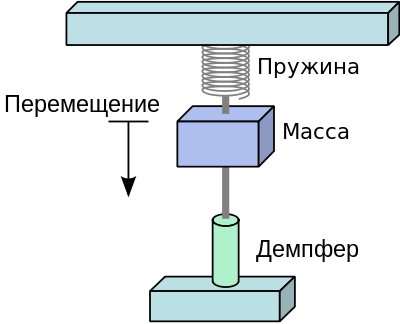
Modelo de dispositivo de acelerômetro mecânico ( original )
Quando a aceleração aumenta, a massa estica a mola. De acordo com a lei de Hooke do currículo escolar de física, você pode facilmente encontrar a aceleração do sistema:
, onde k é o coeficiente de elasticidade da mola, é sua tensão e m é a massa da carga.
Usando três sensores localizados perpendicularmente, é possível descobrir a aceleração de um objeto ao longo de 3 eixos e, conhecendo as condições iniciais, determinar a posição do corpo no espaço.
Este modelo descomplicado é a base para a operação da maioria dos acelerômetros, que podem ser divididos em 3 subgrupos principais:
- mecânico
- eletrônico
- piezoelétrico
Existem também térmicos e ópticos, mas não os consideraremos. Se tudo fica claro com os mecânicos (na verdade, seu trabalho é refletido pelo modelo de cima), então com os eletrônicos e piezoelétricos é um pouco mais interessante.
Acelerômetro piezoelétrico
Esse tipo de sensor é baseado no efeito piezo, descoberto em 1954 por Smith em semicondutores como o germânio e o silício. Esta descoberta deu um forte impulso ao desenvolvimento de sensores e geradores. O efeito é a geração de tensão pelo elemento piezoelétrico na deformação.

Animação do efeito piezoelétrico ( original )
Com o aumento da aceleração, a massa inerte aumenta / diminui a pressão no elemento piezoelétrico. Graças ao efeito piezoelétrico, é gerado um sinal que depende da aceleração externa.

Dispositivo acelerômetro piezoelétrico ( original )
Sensores desse tipo requerem um amplificador adicional, que aumenta a amplitude do sinal e cria uma saída de baixa impedância para funcionar com dispositivos externos. O Preload Bolt é usado para calibrar o valor de aceleração zero, a massa do qual é calculada para corresponder ao ponto zero de aceleração no sistema.
Sensores desse tipo ainda são muito comuns e são usados principalmente em sistemas que exigem alta confiabilidade - automotivos. Para eletrônicos comerciais, são frequentemente usados acelerômetros eletrônicos, que são menores e mais baratos.
Acelerômetros eletrônicos
O princípio de operação dos sensores eletrônicos é baseado em uma mudança na capacitância dos capacitores com uma mudança na aceleração. O modelo de trabalho mais simples é mostrado na foto.
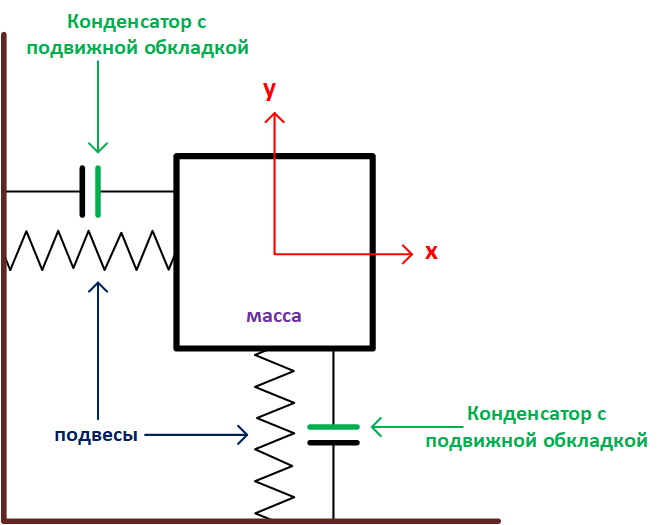
O dispositivo de um acelerômetro eletromecânico de 2 eixos
Quando a aceleração muda, a massa muda a distância entre as placas do capacitor. Da fórmula mais simples para a capacitância de um condensador segue-se que quando d muda na distância entre as placas, a capacitância do capacitor também muda. Este método é amplamente utilizado devido ao desenvolvimento de MEMS (MEMS) - sistemas microeletromecânicos.
As tecnologias MEMS possibilitam a criação de capacitores com placas móveis sobre substrato de silício, o que reduz significativamente o tamanho do dispositivo e, o que não é sem importância, seu custo.

O dispositivo de um acelerômetro eletromecânico de 2 eixos (original do livro "MEMS introdutórios" . Outras ilustrações também foram tiradas deste livro)
O leitor provavelmente tem uma pergunta: "como exatamente detectar uma mudança na capacitância do capacitor?" Tentarei dar uma resposta exaustiva a essa pergunta.
Dispositivo acelerômetro MEMS. Como transformar uma mudança na capacitância em um sinal?
Meia ponte capacitiva
Portanto, antes de descrever a operação do sensor em si, vamos examinar um circuito bastante popular em circuitos - a meia-ponte capacitiva.

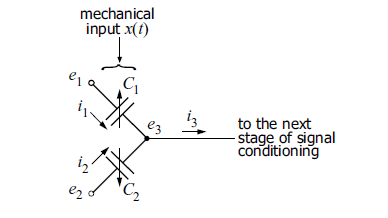
Meia ponte capacitiva - a base dos sensores de
tensão MEMS e são dados de entrada, e - sinal de saída para posterior conversão. As capacitâncias de ambos os capacitores dependem da aceleração externa e variam no valor x (t). Em x = 0, as cargas sobre os contêineres são idênticas e ao mesmo tempo . Desde que x << d descobrimos como a mudança na capacitância dos capacitores depende da mudança na posição da placa.
Derivação da fórmula para alterar a capacidade
Vamos escrever a mudança em cada capacitância quando a placa é deslocada por x:
:
, :
, x <<d, xd d^2 , :
:
, :
, x <<d, xd d^2 , :
Então parte do caminho foi passado, nós temos como o valor da mudança na capacitância depende da mudança na posição da placa (isto é, aceleração externa). É hora de detectar essa mudança: introduzimos correntes adicionais - . Agora resta calcular como a corrente de saída dependerá da mudança na posição da placa.
Meia ponte capacitiva - correntes
Derivação da fórmula para a dependência da corrente de saída na mudança na capacitância
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
Então, se você usar os mesmos potenciais das tensões de entrada obtemos a dependência atual:
O resultado é bastante estranho: a corrente de saída não depende de forma alguma da mudança na capacitância. Para detectar uma mudança na capacitância, é necessário definir tensões de polaridade diferente nas placas, ou seja: , e . A seguir iremos refazer a equação levando em consideração esta modificação.
Dependência da corrente da mudança na posição da placa, levando em consideração as diferentes polaridades das tensões de entrada
1.3:
:
:
1.2 , :
:
:
1.2 , :
A partir dessa equação, os seguintes fatos são visíveis:
- se a posição das placas não mudar com o tempo, então
- da mesma forma se a fonte do sinal constante (DC), então
Para o funcionamento eficaz da meia-ponte capacitiva, é necessário utilizar sinais de entrada variáveis e1 e e2, cujo deslocamento de fase será de 180 graus (para que os potenciais tenham sinais diferentes). Portanto, obtemos a seguinte forma de sinais:
Onde é a frequência do sinal alternado (determinada na fase de projeto, dependendo da largura de banda do sistema e da operação normal dos recipientes mecânicos).
Então, temos a equação (1.4), que mostra como uma mudança na capacitância do capacitor afeta a saída do sistema. No entanto, esse sinal terá uma amplitude muito pequena, além disso, se conectarmos uma carga a ele para se comunicar com o mundo exterior, todo o sistema entrará em colapso. É necessário um amplificador aqui ...
Basta adicionar um amplificador
Vamos adicionar um amplificador ao nosso sistema (vamos assumir que o ganho é - o princípio do terreno virtual também funciona).
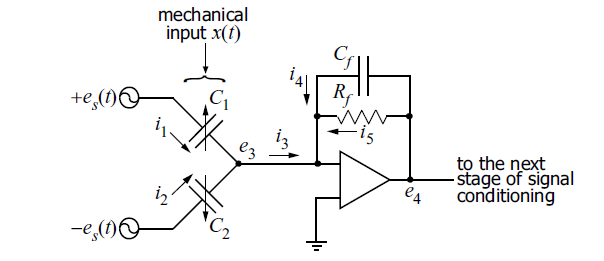
Meia-ponte capacitiva + integrador
Então agora encontramos a dependência da tensão de saída do amplificador na mudança na capacitância.
Tensão de saída do amplificador
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
Como resultado, obtivemos a dependência do sinal de saída do amplificador da mudança na posição da placa do capacitor. O leitor atento deve perceber imediatamente que se trata de modulação de amplitude! De fato, neste sistema temos um sinal x (t), que é multiplicado pelo sinal e é amplificado pelo valor . A próxima etapa é remover a frequência portadora , e obtemos um sinal amplificado x (t) - que é proporcional à aceleração. Um longo caminho de computação nos levou a entender a arquitetura do acelerômetro MEMS.
Arquitetura do acelerômetro MEMS
Vamos primeiro considerar o diagrama funcional do sensor:
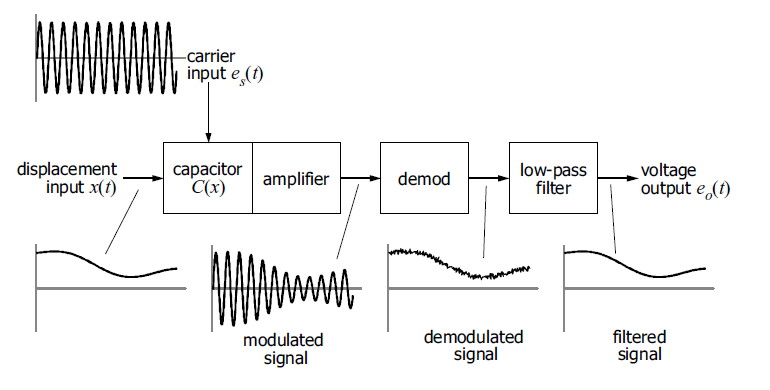
Diagrama funcional de um acelerômetro MEMS
Inicialmente, temos um sinal x (t) - que reflete a mudança na aceleração. A seguir, nós o multiplicamos pelo sinal da portadora e amplificado com um amplificador operacional (no modo integrador). Em seguida, ocorre a demodulação - o circuito mais simples - um diodo e um filtro RC (na realidade, um circuito complicado é usado, sincronizando o processo de modulação e demodulação com uma frequência portadora ). Em seguida, o ruído residual é filtrado usando um filtro passa-baixa.
Como exemplo, citarei um dos primeiros acelerômetros MEMS da Analog Devices - ADXL50:
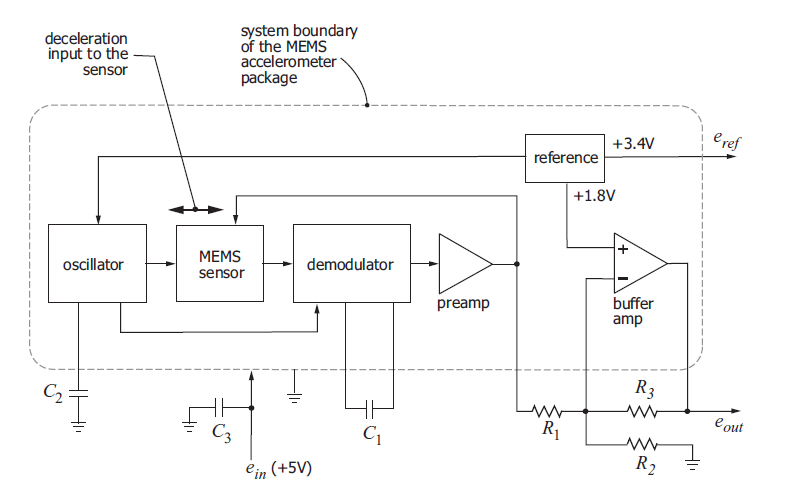
Diagrama de blocos do ADXL50
Provavelmente, dando o diagrama de blocos do sensor no início do artigo, muitos leitores não entenderiam a finalidade de alguns blocos. Agora o véu está entreaberto e podemos discutir cada um deles:
- O bloco denominado “sensor MEMS” é uma meia ponte capacitiva.
- O bloco "oscilador" gera um sinal na freqüência de 1 GHz.
- O sinal do oscilador também é usado para demodulação síncrona.
- O amplificador de saída e os resistores adicionais criam um ponto zero, em relação ao qual o sinal da mudança de aceleração pode ser visto (geralmente VDD / 2 é a metade da fonte de alimentação, para sensores bipolares é “terra”).
- Capacidade externa define a largura de banda de medição do sistema.
- Não há filtro passa-baixa interno neste circuito, mas em circuitos modernos eles existem.
Qual transdutor escolher para trabalhar com sensores?
A escolha do transdutor para trabalhar com sensores depende da precisão que você deseja. Para trabalhar com sensores, ADCs com arquitetura SAR ou Delta-Sigma com alta profundidade de bits são adequados. No entanto, os sensores modernos têm transdutores embutidos. Os líderes nesta área são STMicroelectronics, Analog Devices e NXP. Como exemplo, podemos dar um novo microcircuito com um acelerômetro de 3 eixos e ADC integrado - ADXL362.

Diagrama de bloco do ADXL362
Para trabalhar com o ADC, filtros anti-aliasing são adicionados ao circuito para impedir que harmônicos adicionais entrem no espectro.
Onde obter essa tecnologia?
Existem agora muitas fábricas disponíveis para empresas sem fábricas que oferecem tecnologia MEMS. No entanto, para criar microcircuitos modernos, é necessário integrar as capacidades com placas móveis em uma rota de projeto padrão, porque além de tal capacitância, é necessário projetar blocos adicionais (gerador, demodulador, amplificador operacional, etc.) em um único chip. Como exemplo, as fábricas TSMC e XFab oferecem a tecnologia para implementar um sensor MEMS junto com todo o chicote. A imagem mostra os contêineres que permitem criar um acelerômetro de três eixos:
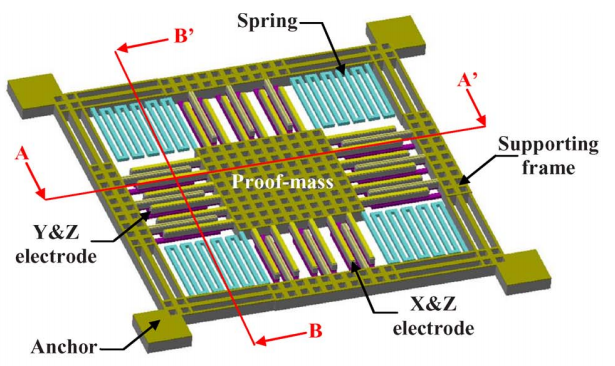
Meia ponte capacitiva de três eixos da TSMC
Há também uma fábrica para a produção de sensores MEMS, Sovtest, na Rússia , mas a empresa não tem a tecnologia para integrar blocos de circuitos adicionais que são necessários para criar o dispositivo final e a única saída é usar tecnologia de micro- montagem .
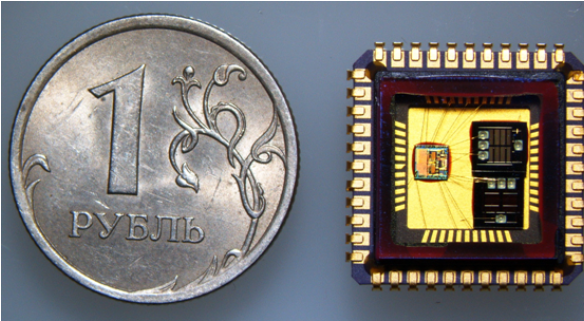
Acelerômetro MEMS desenvolvido pela Sovtest
Que evolução nossa empresa tem nesse sentido?
Temos vários transdutores projetados para trabalhar com sensores. Novos produtos incluem:
- 5101NV035 - conversor de 16 canais baseado em 8 Delta-Sigma ADC, projetado para trabalhar com sensores de corrente
- 1316NX035 - Conversor de frequência e tensão de integração de 4 canais (VFC), projetado para funcionar com acelerômetros e giroscópios de 3 eixos.
Como escrevi no artigo anterior , o período de espera pelos wafers da fábrica pode levar um longo período de tempo. Após o primeiro teste de funcionamento do ADC de 400 MHz, o tempo de chegada das placas e outras medições demoraram mais de meio ano. Durante esse tempo, nossa equipe conseguiu fazer o PNC 1316NX035 (um desenvolvimento do circuito anterior 1316PP1U ), sobre o qual posso falar um pouco.
Conversor de tensão-frequência
Para converter os dados do sensor, são normalmente usados ADCs SAR ou delta-sigma; no entanto, existe outro tipo de conversores - integrando VFCs, que apresentam vantagens significativas:
- Eles ocupam menos espaço e têm menos consumo com a mesma linearidade e ruído.
- Arquitetura simples.
- Alta imunidade a ruídos de entrada e sinais de interferência.
- Imunidade a ruído e interferência do sinal de saída.
- A capacidade de transferir dados sem processamento para um canal de comunicação de radiofrequência.
O microcircuito 1316HX035 é um conversor de tensão em frequência de quatro canais e um código digital; as saídas de um acelerômetro de três eixos são conectadas aos três canais principais de alta precisão. O 4º canal possui um multiplexador de 4 canais de entrada, ao qual você pode conectar sensores adicionais do sistema: temperatura, umidade, etc. Sob um microscópio, o circuito se parece com isto:
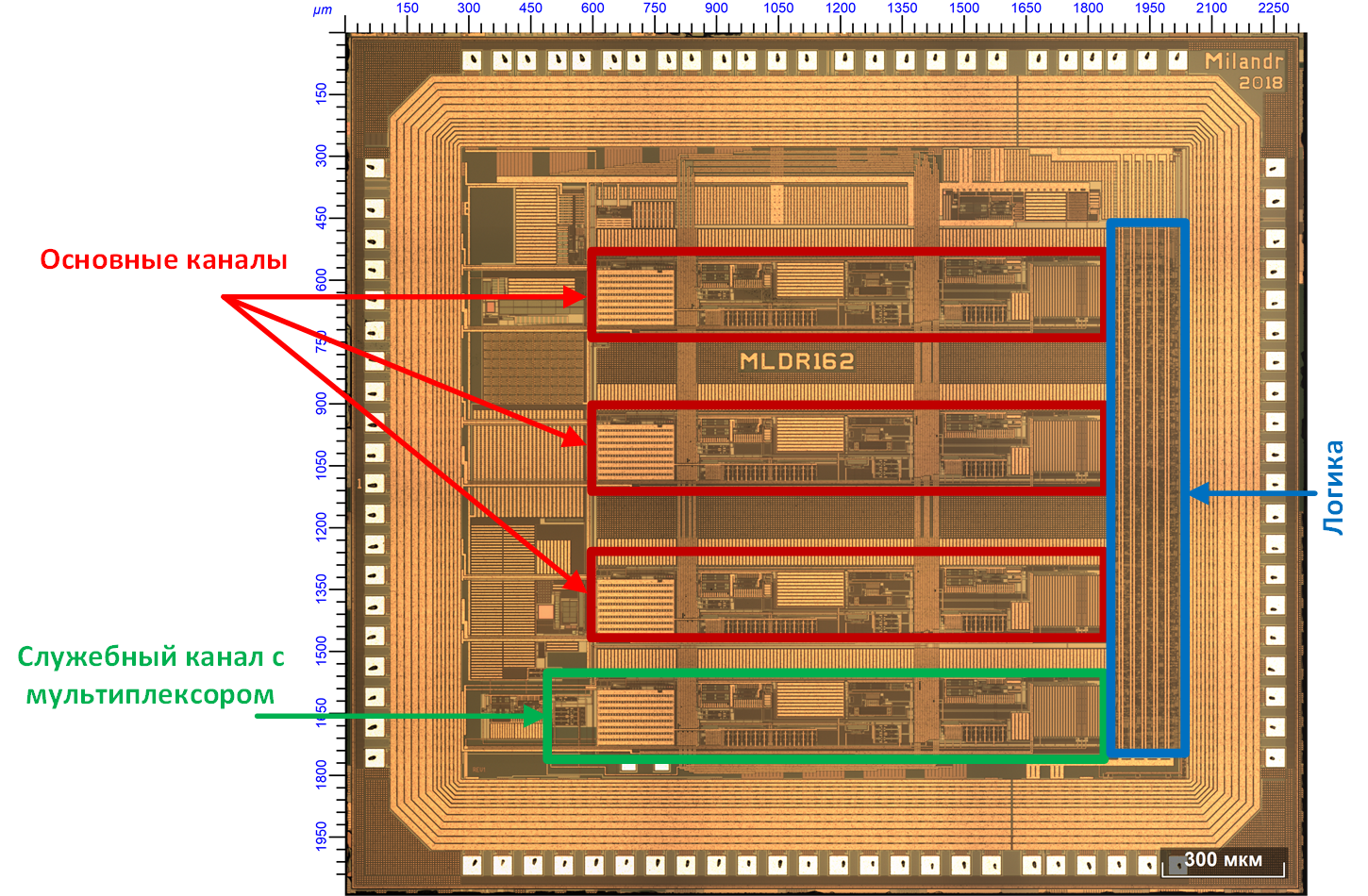
VFC sob um microscópio
Cada um dos três canais principais converte a tensão de entrada na faixa de ± 4 V para uma frequência de até 1250 kHz em 3 saídas, correspondendo a tensões de entrada positivas e negativas. Além disso, o microcircuito possui um contador reverso de 16 bits em cada canal para contagem de pulsos de frequência. A interface SPI é usada para controlar os modos de conversão e amostrar o conteúdo dos contadores de pulso do canal. Os principais requisitos para os parâmetros PNC foram:
- alta estabilidade térmica e temporal da frequência de saída em sinal de entrada zero (entradas aterradas)
- faixa dinâmica de conversão - não inferior a 22 bits
- continuidade da conversão do sinal de entrada e inadmissibilidade da perda de um único pulso de frequência.
Para atender aos requisitos 1 e 2, é usada a autocalibração analógica , que é realizada automaticamente quando o circuito é ligado, e também pode ser iniciada a qualquer momento por comando através da interface SPI. O requisito 3 é fornecido e garantido por soluções de circuitos. Conseguimos alcançar parâmetros de precisão bastante decentes: a não linearidade de conversão típica era de 30 ppm, e o deslocamento de zero era inferior a 0,1 Hz com um fator de conversão de 200 kHz / V. Faixa dinâmica de conversão: fmax / fmin = 2 * 1,25 MHz / 0,3 Hz ∿ 8,33 M, que corresponde a mais de 23 bits.
Existe apenas um “mas” - nutrição bipolar. Para garantir uma boa estabilidade do zero (tensão que corresponde a 0g de aceleração), deve ser usada uma alimentação bipolar. Esta solução é bastante eficaz - afinal, quando 0g corresponder a “terra”, o sistema estará a priori estável. Também melhora o design do sistema. Em sensores modernos, metade da alimentação Vdd / 2 é usada como zero, mas se a tensão no conversor for diferente da tensão no sensor, obtemos automaticamente um deslocamento que precisa ser calibrado adicionalmente.
Provavelmente, para muitos consumidores, a voltagem bipolar assusta um pouco, e nós, como desenvolvedores, entendemos isso. Talvez, no futuro, façamos uma versão comercial para MEMS (ou integremos o sensor ao PNC). Até agora, é claro, são apenas planos, mas tenho certeza de que verão a luz do dia.
PS Encontrou fotos bônus do processo de pesquisa de amostras. Em geral, esta, para mim, é a parte mais interessante do processo de desenvolvimento. Eles colocam em suas mãos sua criação no calor da fábrica, você fornece energia e cruza os dedos e espera - "funciona ou não?"

PPS Quem gostou do tema sensores, futuramente um colega do centro de design de hardware gostaria de falar sobre o sistema inercial que está sendo criado com base em sensores MEMS - SINS .