Na condução de pesquisas científicas e aplicadas, muitas vezes são criados modelos nos quais pontos e / ou vetores de determinados espaços são considerados. Por exemplo, os modelos de cifra de curva elíptica usam espaços afins e projetivos. As projetivas são utilizadas quando é necessário acelerar os cálculos, uma vez que nas fórmulas de manipulação dos pontos de uma curva elíptica derivada no quadro do espaço projetivo não há operação de divisão por uma coordenada, que não pode ser contornada no caso de um espaço afim .
A operação de divisão é apenas uma das operações mais "caras". O fato é que em campos algébricos, e consequentemente em grupos, não há operação de divisão, e a saída (quando é impossível não dividir) é que a operação de divisão é substituída pela multiplicação, mas multiplicada não pela própria coordenada, mas pelo seu valor inverso ... Segue-se disso que primeiro precisamos envolver o algoritmo Euclidiano estendido GCD e algo mais. Em suma, nem tudo é tão simples como retratam os autores da maioria das publicações sobre o ECC. Quase tudo o que foi publicado sobre este tema e não apenas na Internet me é familiar. Além de os autores não serem competentes e se envolverem em palavrões, os avaliadores dessas publicações acrescentam autores nos comentários, ou seja, não veem lacunas nem erros óbvios. Sobre um artigo normal, eles escrevem que já é o 100500 e tem efeito zero.É assim que tudo está organizado no Habré, a análise das publicações é enorme, mas não a qualidade do conteúdo. Não há nada a objetar aqui - a publicidade é o motor dos negócios.
Espaço vetorial linear
O estudo e a descrição dos fenômenos do mundo circundante nos levam necessariamente à introdução e uso de uma série de conceitos como pontos, números, espaços, retas, planos, sistemas de coordenadas, vetores, conjuntos, etc.
Seja r <3>= <r1, r2, r3> vetor do espaço tridimensional, especifica a posição de uma partícula (ponto) em relação à origem. Se considerarmos N elementos, então a descrição de sua posição requer a especificação de 3 ∙ N coordenadas, que podem ser consideradas como as coordenadas de algum vetor no espaço 3N-dimensional. Se considerarmos funções contínuas e suas coleções, chegamos a espaços cuja dimensão é igual ao infinito. Na prática, eles são frequentemente limitados a usar apenas o subespaço de um espaço de função coordenada de dimensão infinita que tem um número finito de dimensões.
Exemplo 1 . A série de Fourier é um exemplo de uso do espaço funcional. Considere a expansão de uma função arbitrária em uma série de Fourier
Pode ser interpretado como a expansão do "vetor" f (x) em um conjunto infinito de vetores de base "ortogonais" sinnx.
Este é um exemplo de abstração e extensão do conceito de vetor a um número infinito de dimensões. Na verdade, sabe-se que para -π≤x≤π

A essência da consideração posterior não sofrerá se abstrairmos da dimensão do espaço vetorial abstrato - seja 3, 3N ou infinito, embora para aplicações práticas, campos de dimensão finita e espaços vetoriais sejam de maior interesse.
Um conjunto de vetores r1, r2, ... será chamado de espaço vetorial linear L se a soma de quaisquer dois de seus elementos também estiver neste conjunto e se o resultado da multiplicação de um elemento por um número C também estiver incluído neste conjunto. Vamos fazer uma reserva imediatamente que os valores do número C podem ser selecionados a partir de um conjunto de números bem definido F - o campo de resíduos módulo um número primo p, que é considerado anexado a L.
Exemplo 2 . Um conjunto de 8 vetores composto por n = números binários de 5 bits
r0 = 00000, r1 = 10101, r2 = 01111, r3 = 11010, r4 = 00101, r5 = 10110, r6 = 01001, r7 = 11100 forma o espaço vetorial L se os números C є {0,1}. Este pequeno exemplo permite verificar a manifestação das propriedades de um espaço vetorial incluído em sua definição.
A soma desses vetores é realizada bit a bit módulo dois, ou seja, sem transferir uns para o bit mais significativo. Observe que se todos os C são reais (no caso geral, C pertence ao campo dos números complexos), então o espaço vetorial é chamado de real.
Formalmente, os axiomas do espaço vetorial são escritos da seguinte maneira:
r1 + r2 = r2 + r1 = r3; r1, r2, r3 є L - comutatividade de adição e fechamento;
(r1 + r2) + r3 = r1 + (r2 + r3) = r1 + r2 + r3 - associatividade de adição;
ri + r0 = r0 + ri = ri; ∀i, ri, r0 є L é a existência de um elemento neutro;
ri + (- ri) = r0, para ∀i existe um vetor oposto (-ri) є L;
1 ∙ ri = ri ∙ 1 = ri existência de uma unidade de multiplicação;
α (β ∙ ri) = (α ∙ β) ∙ ri; α, β, 1, 0 são elementos do campo numérico F, ri є L; a multiplicação por escalares é associativa; o resultado da multiplicação pertence a L;
(α + β) ri = α ∙ ri + β ∙ ri; para ∀i, ri є L, α, β são escalares;
a (ri + rj) = ari + arj para todo a, ri, rj є L;
a ∙ 0 = 0, 0 ∙ ri = 0; (-1) ∙ ri = - ri.
Dimensão e base do espaço vetorial
Ao estudar espaços vetoriais, é interessante esclarecer questões como o número de vetores que formam o espaço inteiro; qual é a dimensão do espaço; Qual é o menor conjunto de vetores, aplicando-se a ele a operação de somatório e multiplicação por um número, que permite formar todos os vetores do espaço? Essas questões são fundamentais e não podem ser ignoradas, uma vez que sem respostas para elas, a clareza de percepção de tudo o mais que compõe a teoria dos espaços vetoriais se perde.
Descobriu-se que a dimensão do espaço está intimamente relacionada à dependência linear dos vetores e ao número de vetores linearmente independentes que podem ser escolhidos no espaço em estudo de várias maneiras.
Independência linear de vetores
Um conjunto de vetores r1, r2, r3 ... r de L é denominado linearmente independente se para eles a relação
é satisfeito apenas sob a condição de igualdade simultânea .
Tudo , k = 1 (1) p, pertencem ao campo de resíduo numérico módulo dois
F = {0, 1}.
Se em algum espaço vetorial L pode-se escolher um conjunto de vetores p para os quais a relação é satisfeito, desde que nem todossimultaneamente, ou seja, no campo das deduções acabou por ser possível selecionar um conjunto , k = 1 (1) , entre os quais existem outros diferentes de zero, então tais vetores são chamados de dependentes lineares.
Exemplo 3. Dois vetores no plano = <0, 1>Te = <1, 0>Tsão linearmente independentes, uma vez que na relação (T-transposição)
é impossível pegar qualquer par de números coeficientes diferentes de zero ao mesmo tempo, de modo que a razão seja satisfeita.
Três vetores = <0, 1>T, = <1, 0>T, = <1, 1>Tformam um sistema de vetores linearmente dependentes, uma vez que na relação

igualdade pode ser assegurada escolhendo os coeficientes diferente de zero ao mesmo tempo. Além disso, o vetor é uma função e (soma deles), o que indica a dependência a partir de e ... A prova do caso geral é a seguinte.
Deixe pelo menos um dos valores, k = 1 (1) p, por exemplo, , e a relação é satisfeita. Isso significa que os vetores, k = 1 (1) , são linearmente dependentes
Vamos separar explicitamente o vetor r

O vetor r p é considerado uma combinação linear de vetoresou r p através dos vectores restantes é expressa de uma forma linear, isto é, r p linearmente depende dos outros. Ele é a função deles.
Em um plano bidimensional, quaisquer três vetores são linearmente dependentes, mas quaisquer dois vetores não colineares são independentes. No espaço 3D, quaisquer três vetores não coplanares são linearmente independentes, mas quaisquer quatro vetores são sempre linearmente dependentes.
Dependência / independência da população {} vetores são frequentemente determinados pelo cálculo do determinante da matriz de Gram (suas linhas são os produtos escalares de nossos vetores). Se o determinante for zero, existem vetores dependentes entre os vetores; se o determinante for diferente de zero, os vetores da matriz são independentes.
O determinante de Gram (Gramiano) do sistema vetorial
o determinante da matriz de Gram deste sistema é denominado no espaço euclidiano:
Onde - produto escalar de vetores
e ...
Dimensão e base de um espaço vetorial
A dimensão s = d (L) de um espaço L é definida como o maior número de vetores em L que formam um conjunto linearmente independente. A dimensão não é o número de vetores em L, que pode ser infinito, e não o número de componentes do vetor.
Espaços de dimensão finita s ≠ ∞ são chamados de dimensão finita se
s = ∞, dimensão infinita.
A resposta à pergunta sobre o número mínimo e a composição de vetores que garantem a geração de todos os vetores em um espaço vetorial linear é a seguinte afirmação.
Qualquer coleção de s de vetores linearmente independentes no espaço L forma suas bases e s. Isso decorre do fato de que qualquer vetorO espaço vetorial linear s-dimensional L pode ser representado de uma maneira única como uma combinação linear de vetores básicos.
Fixamos e denotamos pelo símbolo, i = 1 (1) s, é uma das coleções que formam a base do espaço L. Então
Os números r ki , i = 1 (1) s são chamados de coordenadas do vetor na base , i = 1 (1) s e r ki = (, )
Deixe-nos mostrar a singularidade da representação... Obviamente, o conjunto, é dependente, pois , i = 1 (1) s é uma base. Em outras palavras, existem tais não simultaneamente igual a zero, que ...
Além disso, deixeporque se , então pelo menos um de , seria diferente de zero e os vetores , i = 1 (1) s, seria linearmente dependente, o que é impossível, uma vez que se trata de uma base. Consequentemente,


Usando o método de prova "por contradição", assumir que a representação escritanão é o único nesta base e há algo mais

Então anotamos a diferença de representações, que, claro, é expressa como

Obviamente, os lados direito e esquerdo são iguais, mas o esquerdo representa a diferença do vetor consigo mesmo, ou seja, igual a zero. Consequentemente, o lado direito também é zero. Vetores, i = 1 (1) s são linearmente independentes, então todos os coeficientes para eles podem ser apenas zero. A partir disso, obtemos isso

e isso só é possível para

A escolha da base. Ortonormalidade
Os vetores são chamados de normalizados se o comprimento de cada um deles for igual a um. Isso pode ser alcançado aplicando o procedimento de normalização a vetores arbitrários.
Os vetores são chamados ortogonais se forem perpendiculares uns aos outros. Esses vetores podem ser obtidos aplicando um procedimento de ortogonalização a cada um deles. Se ambas as propriedades são satisfeitas para um conjunto de vetores, então os vetores são chamados de ortonormais.
A necessidade de considerar bases ortonormais é causada pela necessidade de usar transformações rápidas de funções unidimensionais e multidimensionais. As tarefas desse processamento surgem no estudo de códigos que codificam mensagens de informação em redes de comunicação de diversos fins, no estudo de imagens obtidas.
através de dispositivos automáticos e automatizados, em uma série de outras áreas usando representações digitais da informação.
Definição. A coleção de n vetores linearmente independentes de um
espaço vetorial n-dimensional V é chamada de base.
Teorema . Cada vetor x de um espaço vetorial linear n-dimensional V pode ser representado, além disso, de uma maneira única, na forma de uma combinação linear de vetores de base. O espaço vetorial V sobre o campo F tem as seguintes propriedades:
0 x = 0 (0 no lado esquerdo da igualdade é um elemento neutro do grupo aditivo do campo F; 0 no lado direito da igualdade é um elemento do espaço V, que é um elemento de unidade neutra do grupo aditivo V, chamado de vetor zero );
(- 1) · x = –x; –1є F; x є V; –X є V;
Se α x = 0єV, então para x ≠ 0 sempre α = 0.
Seja Vn (F) o conjunto de todas as sequências (x1, x2, ..., xn) de comprimento n com componentes do campo F, isto é, Vn (F) = {x, tal que x = (x1, x2, ..., xn), xi є F;
i = 1 (1) n}.
A adição e multiplicação por um escalar são definidas como segue:
x + y = (x1 + y1, x2 + y2,…, xn + yn);
α x = (α x1, α x2,…, α xn), onde y = (y1, y2,…, yn),
então Vn (F) é um espaço vetorial sobre o campo F.
Exemplo 4 . No espaço vetorial r = 00000, r1 = 10101, r2 = 11010, r3 = 10101 sobre o campo F2 = {0,1} determine sua dimensão e base.
Decisão. Vamos formar uma tabela de adição de vetores de um espaço vetorial linear
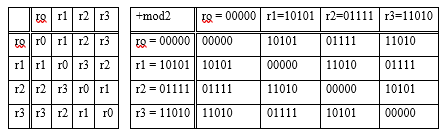
Neste espaço vetorial V = {ro, r1, r2, r3} cada vetor tem a si mesmo como seu oposto. Quaisquer dois vetores, excluindo r, são linearmente independentes, o que é fácil de verificar
c1 · r1 + c2 · r2 = 0; c1 r1 + c3 r3 = 0; c2r2 + c3 r3 = 0;
Cada uma das três relações é válida apenas para valores zero simultâneos dos pares de coeficientes ci, cj є {0,1}.
Quando três vetores diferentes de zero são considerados simultaneamente, um deles é sempre a soma dos outros dois ou igual a si mesmo, e r1 + r2 + r3 = r.
Assim, a dimensão do espaço vetorial linear considerado é igual a dois s = 2, d (L) = s = 2, embora cada um dos vetores tenha cinco componentes. A base do espaço é a coleção (r1, r2). Você pode usar o par (r1, r3) como base.
Teoricamente e praticamente, a questão de descrever o espaço vetorial é importante. Acontece que qualquer conjunto de vetores de base pode ser visto como linhas de alguma matriz G, chamada de matriz geradora do espaço vetorial. Qualquer vetor deste espaço pode ser representado como uma combinação linear de linhas da matriz G ( como, por exemplo, aqui ).
Se a dimensão do espaço vetorial é igual ak e é igual ao número de linhas da matriz G, a classificação da matriz G, então obviamente existem k coeficientes com q valores diferentes para gerar todas as combinações lineares possíveis de linhas da matriz. Além disso, o espaço vetorial L contém q k vetores.
O conjunto de todos os vetores de ℤpn com operações de adição de vetores e multiplicação de um vetor por um escalar de ℤp é um espaço vetorial linear.
Definição . Um subconjunto W de um espaço vetorial V satisfazendo as condições:
Se w1, w2 є W, então w1 + w2 є W,
para qualquer α є F e w є W, o elemento αw є W é
ele próprio um espaço vetorial sobre o campo F e é chamado de subespaço do espaço vetorial V.
Seja V um espaço vetorial sobre um campo F e um conjunto W ⊆ V. O conjunto W é um subespaço do espaço V se W em relação às operações lineares definidas em V for um espaço vetorial linear.
Mesa. Características dos espaços vetoriais
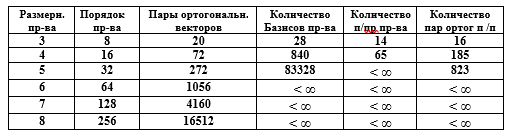
A compactação da representação matricial de um espaço vetorial é óbvia. Por exemplo, a especificação de L vetores de números binários de 50 bits, entre os quais 30 vetores formam a base do espaço vetorial, requer a formação da matriz G [30,50], e o número descrito de vetores excede 10 9 , o que parece não ser razoável na notação elemento a elemento.
Todas as bases de qualquer espaço L são divididas pelo subgrupo P de matrizes não degeneradas com det G> 0 em duas classes. Uma delas (arbitrariamente) é chamada de classe com bases orientadas positivamente (direita), a outra classe contém bases esquerdas.
Nesse caso, eles dizem que uma orientação é dada no espaço. Depois disso, qualquer base é um conjunto ordenado de vetores.
Se a numeração de dois vetores for alterada na base da direita, a base ficará à esquerda. Isso se deve ao fato de que duas linhas da matriz G estão trocadas, portanto, o determinante detG mudará de sinal.
Norma e produto escalar de vetores
Depois de resolver as questões sobre como encontrar a base de um espaço vetorial linear, sobre a geração de todos os elementos deste espaço e sobre a representação de qualquer elemento e do próprio espaço vetorial através dos vetores de base, podemos nos colocar o problema de medir neste espaço as distâncias entre elementos, ângulos entre vetores, valores de componentes do vetor , os comprimentos dos próprios vetores.
Um espaço vetorial real ou complexo L é chamado de espaço vetorial normado se cada vetor r nele puder ser associado a um número real || r || - módulo vetorial, norma. Um vetor unitário é um vetor cuja norma é igual a um. O vetor zero tem componentes zero.
Definição... Um espaço vetorial é chamado de unitário se uma operação binária é definida nele que atribui um escalar a cada par ri, rj de vetores de L. Entre parênteses (ri, rj) o escalar ou produto interno de ri e rj é escrito (denotado), e
1. (ri, rj) = ri ∙ rj;
2. (ri, rj) = (ri ∙ rj) *, onde * indica conjugação complexa ou simetria Hermitiana;
3. (ri, rj) = (ri ∙ rj) - lei associativa;
4. (ri + rj, rk) = (ri ∙ rk) + (rj ∙ rk) - lei distributiva;
5. (ri, rk) ≥ 0 e de (ri, rj) = 0 segue-se ri = 0.
Definição . O valor positivo da raiz quadrada
 é chamado de norma (ou comprimento, módulo) do vetor ri. Se = 1, então o vetor ri é chamado de normalizado...
é chamado de norma (ou comprimento, módulo) do vetor ri. Se = 1, então o vetor ri é chamado de normalizado...
Dois vetores ri, rj do espaço vetorial unitário L são mutuamente ortogonais se seu produto escalar for igual a zero, ou seja, (ri, rj) = 0.
Para s = 3 em um espaço vetorial linear, é conveniente escolher três vetores perpendiculares mutuamente como base. Essa escolha simplifica muito várias dependências e cálculos. O mesmo princípio de ortogonalidade é usado na escolha de uma base em espaços e outras dimensões s> 3. Usar a operação introduzida do produto escalar de vetores fornece a possibilidade de tal escolha.
Vantagens ainda maiores são alcançadas ao escolher como base do espaço vetorial de vetores normalizados ortogonais - a base ortonormal... Salvo indicação em contrário, no que se segue iremos sempre assumir que a base ei, i = 1 (1) s é escolhida desta forma, ou seja,
Em espaços vetoriais unitários, essa escolha é sempre realizável. Deixe-nos mostrar a viabilidade de tal escolha.
Definição. Seja S = {v1, v2,…, vn} um subconjunto finito de um espaço vetorial V sobre um campo F.
Uma combinação linear de vetores de S é uma expressão da forma a1 ∙ v1 + a2 ∙ v2 +… + an ∙ vn, onde cada ai ∊ F.
O envelope para um conjunto S (notação {S}) é o conjunto de todas as combinações lineares de vetores de S. O envelope para S é um subespaço de V.
Se U é um espaço em V, então U é medido por S (S contrai U) se {S} = VOCÊ.
O conjunto de vetores S é linearmente dependente de F, se houver escalares a1, a2, ..., an em F, nem todos os zeros para os quais a1 ∙ v1 + a2 ∙ v2 + ... + an ∙ vn = 0. Se não houver escalares, então o conjunto de vetores S linearmente independentemente sobre F.
Se um espaço vetorial V é medido por um sistema linearmente independente de vetores S (ou o sistema S contrai o espaço V), então o sistema S é chamado de base para V.
Redução de uma base arbitrária à forma ortonormal
Seja o espaço V uma base não ortonormal ē i , i = 1 (1) s. Denotamos a norma de cada vetor de base pelo símbolo

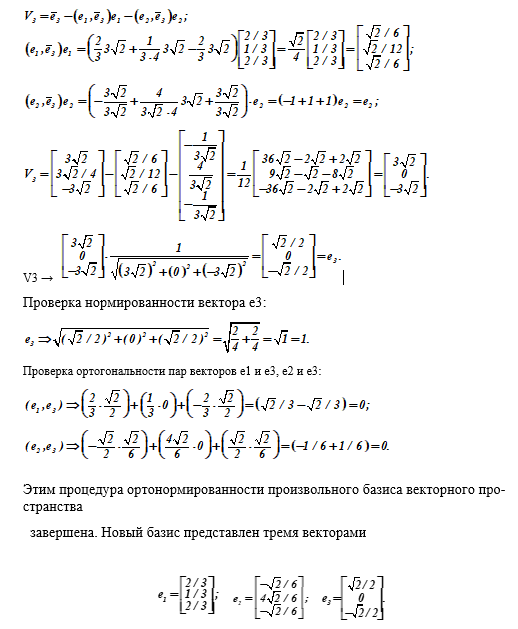
O procedimento para reduzir a base a uma forma ortonormalizada é baseado no processo de ortogonalização de Gram-Schmidt, que por sua vez é implementado por fórmulas recorrentes

Na forma expandida, o algoritmo de ortogonalização e normalização de base contém as seguintes condições:
Divida o vetor ē 1 por sua norma; obtemos o vetor normalizado ē i = ē 1 / (|| ē 1 ||);
Formamos V2 = ē 2 - (ē 1 , ē 2 ) e 1 e normalizamos, obtemos e 2 . É claro que, em seguida,
(e1, e2) ~ (e1, e2) - (e1, e 2 ) (e1, E1) = 0;
Construindo V3 = ē 3 - (e1, ē 3 ) e1 - (e2, ē 3 ) e2 e normalizando-o, obtemos e3.
Para isso, temos imediatamente (e1, e3) = (e2, e3) = 0.
Continuando este processo, obtemos um conjunto ortonormal ē i , i = 1 (1) s. Este conjunto contém vetores linearmente independentes, uma vez que são mutuamente ortogonais.
Vamos nos certificar disso. Deixe a relação
Se o conjunto ē i , i = 1 (1) s é dependente, então pelo menos um coeficiente cj não é igual a zero cj ≠ 0.
Multiplicando ambos os lados da razão por ej, obtemos
(ej, c1 ∙ e1) + (ej, c2 ∙ e2) + ... + (ej, cj ∙ ej) + ... + (ej, cs ∙ rs) = 0.
Cada soma na soma é igual a zero como o produto escalar dos vetores ortogonais, exceto para (ej, cj ∙ ej), que é igual a zero em doença. Mas neste termo
(ej, ej) = 1 ≠ 0, portanto, apenas cj pode ser zero.
Assim, a suposição de que cj ≠ 0 não é verdadeira e a coleção é linearmente independente.
Exemplo 5 . Uma base de um espaço vetorial tridimensional é fornecida:
{<-1, 2, 3, 0>, <0, 1, 2, 1>, <2, -1, -1,1>}.
O produto escalar é definido pela relação:
(<x1, x2, x3, x4>, <y1, y2, y3, y4>) = x1 ∙ y1 + x2 ∙ y2 + x3 ∙ y3 + x4 ∙ y4.
Usando o procedimento de ortogonalização de Gram - Schmidt, obtemos um sistema de vetores:
a1 = <-1, 2, 3, 0>; a2 = <0, 1, 2, 1> -4 <-1, 2, 3,0> / 7 = <4, -1, 2, 7> / 7;
a3 = <2, -1, -1, 1> + ½ <-1, 2, 3, 0> - <4, -1, 2, 7> / 5 = <7, 2, 1, -4> / dez.
(a1, a2) = (1 + 4 + 9 + 0) = 14;
a1 E = a1 / √14;
a2- (a1 E , a2) ∙ a1 E = a2- (8 / √14) (a1 / √14) = a2 - 4 ∙ a1 / 7;
O leitor é convidado a processar o terceiro vetor independentemente.
Os vetores normalizados têm a forma:
a1 E = a1 / √14;
a2 E = <4, -1, 2, 7> / √70;
a3 E = <7, 2, 1, -4>/ √70;
Abaixo, no exemplo 6, um processo detalhado e detalhado de cálculo da derivação de uma base ortonormal de uma base simples (tomada ao acaso) é fornecido.
Exemplo 6 . Reduza a base dada do espaço vetorial linear à forma ortonormal.
Dado: vetores de base
Subespaços de espaços vetoriais
Estrutura do espaço vetorial A
representação de objetos (corpos) em espaços multidimensionais é uma tarefa muito difícil. Assim, um cubo quadridimensional tem cubos tridimensionais comuns como faces, e um desdobramento de um cubo quadridimensional pode ser construído no espaço tridimensional. Até certo ponto, a "imagem" e a clareza de um objeto ou de suas partes contribuem para seu estudo mais bem-sucedido.
O anterior nos permite supor que os espaços vetoriais podem ser desmembrados de alguma forma, para destacar partes deles, chamadas subespaços. Obviamente, a consideração de espaços multidimensionais e especialmente de dimensões infinitas e objetos neles nos priva da clareza das representações, o que torna muito difícil estudar objetos em tais
espaços. Mesmo questões aparentemente simples, como as características quantitativas dos elementos dos poliedros (o número de vértices, arestas, faces, etc.) nesses espaços estão longe de estar completamente resolvidas.
Uma forma construtiva de estudar tais objetos é selecionar seus elementos (por exemplo, arestas, faces) e descrevê-los em espaços de menor dimensão. Portanto, um cubo quadridimensional tem cubos tridimensionais comuns como faces, e uma varredura de um cubo quadridimensional pode ser construída no espaço tridimensional. Até certo ponto, a
"imagem" e a clareza do objeto ou de suas partes contribuem para seu estudo mais bem-sucedido.
Se L for uma extensão do campo K, então L pode ser considerado um espaço vetorial (ou linear) sobre K. Os elementos do campo L (isto é, vetores) formam um grupo abeliano por adição. Além disso, cada “vetor” a є L pode ser multiplicado por um “escalar” r є K, e o produto ra novamente pertence a L (aqui ra é simplesmente o produto no sentido da operação de campo L dos elementos r e a deste campo). As leis também sustentam
r ∙ (a + b) = r ∙ a + r ∙ b, (r + s) ∙ a = r ∙ a + r ∙ s, (r ∙ s) ∙ a = r ∙ (s ∙ a) e 1 ∙ a = a, onde r, s є K, a, b є L.
O que foi dito anteriormente nos permite supor que os espaços vetoriais podem ser desmembrados de alguma forma, para destacar partes deles, chamadas subespaços. Obviamente, o principal resultado dessa abordagem é reduzir a dimensão dos subespaços alocados. Deixe os subespaços L1 e L2 serem distinguidos em um espaço vetorial linear L. Como base para L1, um conjunto menor ei, i = 1 (1) s1, s1 <s, é escolhido do que no L. original.
Os vetores de base restantes geram outro subespaço L2, chamado de "complemento ortogonal" do subespaço L1. Usaremos a notação L = L1 + L2. Isso não significa que todos os vetores do espaço L pertençam a L1 ou L2, mas que qualquer vetor de L pode ser representado como a soma de um vetor de L1 e um vetor ortogonal de L2.
Não é o conjunto de vetores do espaço vetorial L que é dividido, mas a dimensão d (L) e o conjunto de vetores de base. Assim, o subespaço L1 de um espaço vetorial L é o conjunto L1 de seus elementos (de menor dimensão), que por sua vez é um espaço vetorial no que diz respeito às operações de adição e multiplicação por um número introduzido em L.
Cada subespaço vetorial linear Li - contém um vetor zero e, junto com qualquer um de seus vetores, contém todas as suas combinações lineares. A dimensão de qualquer subespaço linear não excede a dimensão do próprio espaço original.
Exemplo 7.No espaço tridimensional comum, os subespaços são todas linhas retas (dimensão s = 1), linhas, planos (dimensão s = 2) passando pela origem. No espaço n de polinômios de grau no máximo n, os subespaços são, por exemplo, todos k para k <n, pois somando e multiplicando por números polinômios de grau no máximo k, obteremos novamente os mesmos polinômios.
Entretanto, cada um dos espaços Pn está contido como subespaços no espaço P de todos os polinômios com coeficientes reais, e este último é um subespaço do espaço C de funções contínuas.
Matrizes do mesmo tipo sobre o campo de números reais também formam um espaço vetorial linear, uma vez que satisfazem todos os axiomas dos espaços vetoriais. O espaço vetorial L2 de conjuntos de comprimento n, cada um dos quais é ortogonal ao subespaço L1 de conjuntos de comprimento n, forma um subespaço L2, chamado de espaço zero para L1. Em outras palavras, cada vetor de L2 é ortogonal a cada vetor de L1 e vice-versa.
Ambos os subespaços L1 e L2 são subespaços do espaço vetorial L de conjuntos de comprimento n. Na teoria da codificação [4], cada um dos subespaços L1 e L2 gera um código linear dual ao código gerado por outros subespaços. Se L1 é um código (n, k), então L2 é um código (n, n - k). Se um código é um espaço vetorial de linhas de alguma matriz, então seu código dual é o espaço zero dessa matriz e vice-versa.
Uma questão importante no estudo dos espaços vetoriais Vn é o estabelecimento de sua estrutura (estrutura). Em outras palavras, são de interesse os elementos, suas coleções (subespaços de dimensão 1 <k <n), bem como seus relacionamentos (ordenação, aninhamento, etc.). Assumimos que um dado espaço vetorial Vn sobre um corpo finito GF (q) formado por q = p r elementos, onde p é um número primo er é um inteiro.
Os seguintes resultados são conhecidos.
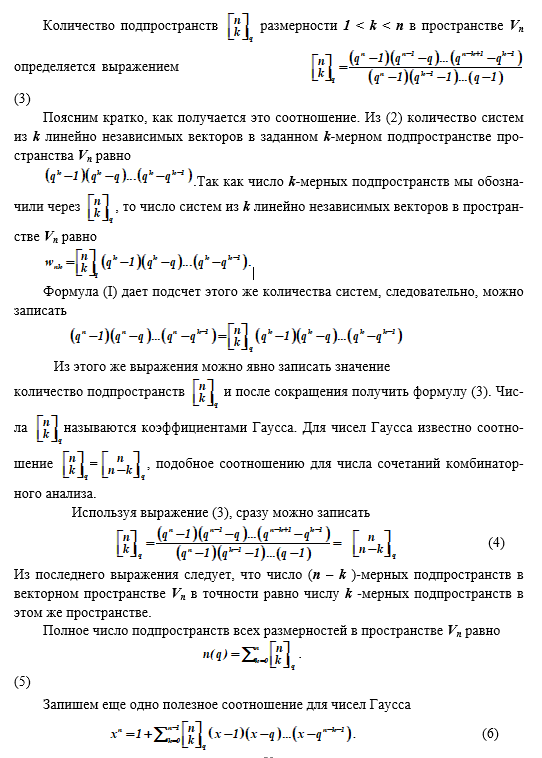
O número de subespaços de um espaço vetorial

Deixe-nos dar a seguinte justificativa. Cada vetor v1 ≠ 0 de um sistema de k vetores linearmente independentes (v1, v2,…, vk) podem ser escolhidos de q n - 1 maneiras. O próximo vetor v2 ≠ 0 não pode ser expresso linearmente em termos de v1, ou seja, pode ser escolhido de maneiras q n - q, etc.
O último vetor vk ≠ 0 também não é linearmente expresso em termos dos vetores previamente selecionados v1, v2, ..., vk e, portanto, pode ser escolhido de maneiras q n - q k - 1. O número total de maneiras de selecionar um conjunto de vetores v1, v2, ..., vk, portanto, é definido como o produto do número de seleções de vetores individuais, o que dá a fórmula (1). Para o caso em que k = n, temos wp = wn, n e da fórmula (I) obtemos a fórmula (2).
Resultados de generalização importantes sobre as dimensões dos subespaços.
A coleção de todas as tuplas de comprimento n ortogonal ao subespaço V1 de tuplas de comprimento n forma o subespaço V2 de tuplas de comprimento n. Este subespaço V2 é chamado de espaço nulo para V1.
Se um vetor é ortogonal a cada um dos vetores que geram o subespaço V1, então esse vetor pertence ao espaço zero para V1.
Um exemplo de (V1) é o conjunto de vetores de 7 bits da matriz geradora do código de Hamming (7,4), com um subespaço zero (V2) de vetores de 7 bits que formam a matriz de verificação de paridade deste código.
Se a dimensão do subespaço (V1) das tuplas de comprimento n for igual a k, então a dimensão do subespaço zero (V2) é n - k.
Se V2 é um subespaço de tuplas de comprimento ne V1 é um espaço zero para V2, então (V2) é um espaço zero para V1.
Seja U∩V a coleção de vetores pertencentes a U e V, então U∩V é um subespaço.
Seja U⊕V o subespaço que consiste na coleção de todas as combinações lineares da forma a u + b v , onde u є U, v є V, ab são números.
A soma das dimensões dos subespaços U∩V e U⊕V é igual à soma das dimensões dos subespaços U e V.
Seja U2 o subespaço zero para U1 e V2 o espaço zero para V1. Então U2∩V2 é o espaço zero para U1⊕V1.
Conclusão
O artigo considera os conceitos básicos de espaços vetoriais, frequentemente utilizados na construção de modelos para a análise de sistemas de criptografia, codificação e esteganografia, processos que neles ocorrem. Assim, no novo padrão de criptografia americano, são usados espaços afins, e em assinaturas digitais em curvas elípticas, tanto espaços afins quanto
projetivos (para acelerar o processamento dos pontos da curva).
Não estamos falando desses espaços na obra (não se pode amontoar tudo em uma pilha, e eu também limito o volume de publicação), mas a menção a isso não é em vão. Autores que escrevem sobre meios de proteção, sobre algoritmos de cifras, ingenuamente acreditam que entendem os detalhes dos fenômenos descritos, mas a compreensão dos espaços euclidianos e de suas propriedades é transferida sem reservas para outros espaços, com propriedades e leis diferentes. O público leitor é enganado quanto à simplicidade e acessibilidade do material.
Uma falsa imagem da realidade é criada no campo da segurança da informação e equipamentos especiais (tecnologia e matemática).
Em geral, eu tomei a iniciativa de como os leitores têm a sorte de julgar.
Literatura
1. Avdoshin S.M., Nabebin A.A. Matemática discreta. Álgebra modular, criptografia, codificação. - M.: DMK Press, 2017.-352 p.
2. Akimov O.E. Matemática discreta Lógica, grupos, gráficos - Moscou: Laboratório Base. Zn., 2001.-352 p.
3. Anderson D.A. Discrete mathematics and combinatorics), Moscou: Williams, 2003, 960 p.
4. Berlekamp E. Teoria da codificação algébrica. -M.: Mir, 1971.- 478 p.
5. Vaulin A.E. Matemática discreta em problemas de segurança de computadores. H 1- SPb.: VKA im. A.F. Mozhaisky, 2015.219 p.
6. Vaulin A.E. Matemática discreta em problemas de segurança de computadores. H 2- SPb.: VKA im. A.F. Mozhaisky, 2017.-151 p.
7. Gorenstein D. Grupos finitos simples. Introdução à sua classificação. -M.: Mir, 1985.- 352 p.
7. Graham R., Knut D., Ptashnik O. Concrete mathematics. Foundations of informatics.-M: Mir, 1998. -703 p.
9. Elizarov V.P. Anéis finais. - M.: Helios ARV, 2006. - 304 p.
Ivanov B.N. Matemática discreta: algoritmos e programas-M.: Lab.Baz. Knowledge., 2001.280 p.
10. Yerusalimsky Ya.M. Matemática discreta: teoria, problemas, aplicações-M.: Vuzovskaya kniga, 2000.-280 p.
11. Korn G., Korn T. Manual de matemática para cientistas e engenheiros. -M.: Nauka, 1973.-832 p.
12. Lidl R., Niederreiter G. Finite fields: In 2 volumes.Vol. 1-M.: Mir, 1988. - 430 p.
13. Lidl R., Niederreiter G. Finite fields: In 2 volumes.Vol. 2-M.: Mir, 1988. - 392 p.
14. Lyapin E.S., Aizenshtat A.Ya., Lesokhin M.M., Exercises on the theory of groups.- Moscow: Nauka, 1967.-264 p.
15. Mutter V.M. Fundamentos da transmissão de informações anti-bloqueio. -EU. Energoatomizdat, 1990, 288 p.
16. Nabebin A.A. Matemática discreta .- M.: Lab. Base. Knowledge., 2001.280 p.
17. Novikov F.A. Discrete mathematics for programmers.- SPb.: Peter, 2000.-304 p.
18. Rosenfeld B.A. Espaços multidimensionais. -M .: Nauka, 1966.-648 p.
18. Hall M. A teoria dos grupos.-M: Izd. IL, 1962.- 468 p.
19. Shikhanovich Yu.A. Grupos, anéis, treliças. - SPb.: Kirtsideli, 2006. - 368 p.
20. Shneperman L.B. O curso de álgebra e teoria dos números em problemas e exercícios: Em 2 horas Parte 2.-Mn.: Vysh. shk., 1987.-256 p.
21. Shneperman LB Coleção de problemas em álgebra e teoria dos números - Minsk: Design PRO, 2000. -240 p.