Ao implementar um sistema de controle de posição de objeto, uma estrutura de dois circuitos é frequentemente usada, que inclui dois reguladores: a posição da carga e a velocidade do atuador. Neste caso, é necessário ajustar simultaneamente os dois reguladores. Esta tarefa pode ser resolvida usando a ferramenta Control System Tuner .
Modelo de sistema
, , .


Electric actuator Load : .
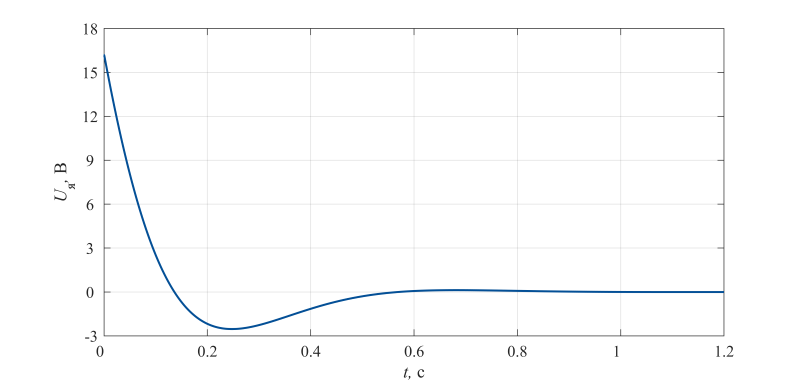
, ±24 , clamping .
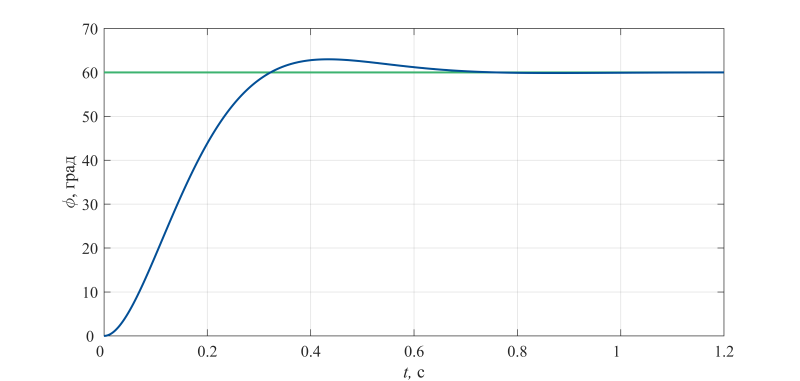
, ±60°.
, .. , , 2.5 .

:
- (Overshoot) 5%;
- (Settling time) 1 .
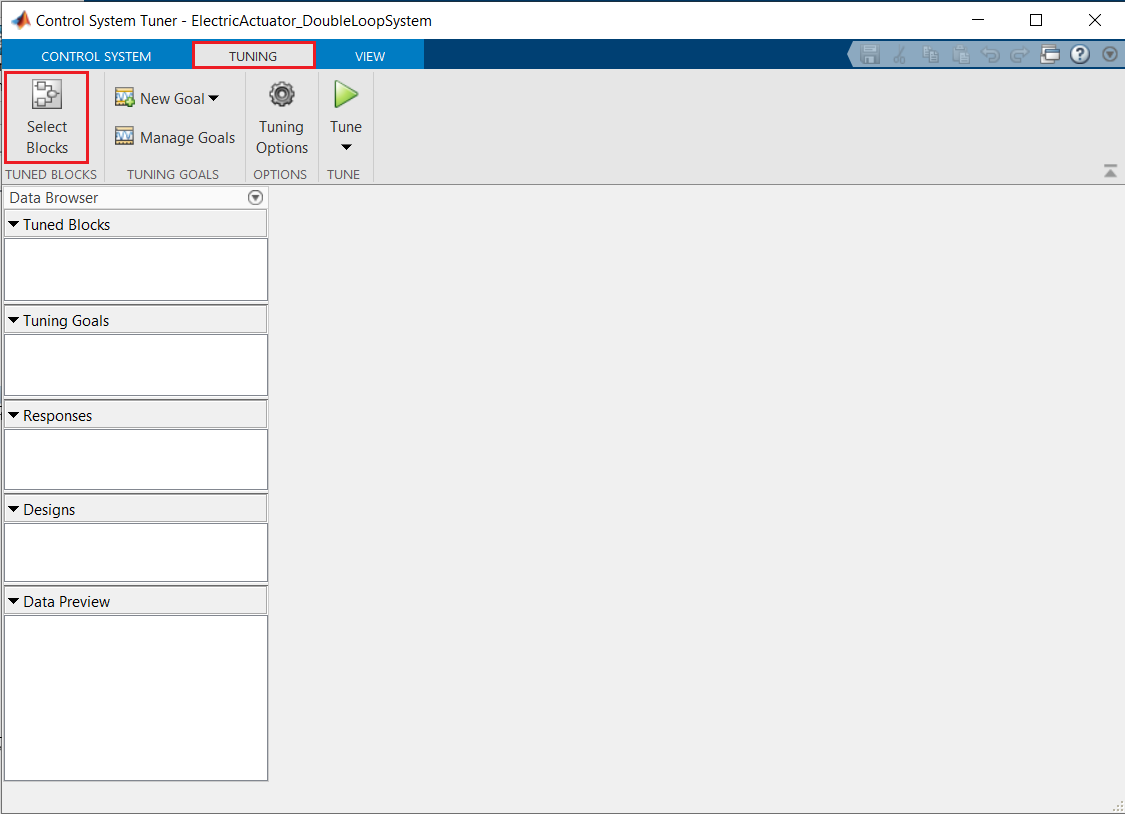
Control System Tuner APPS Simulink, CONTROL SYSTEMS.
:
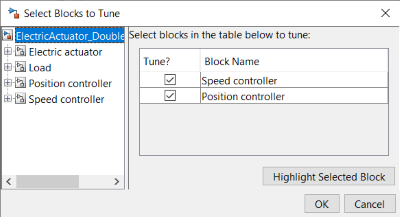
TUNING Select Block.
Add Blocks .

OK. Tuned Blocks Data Browser.
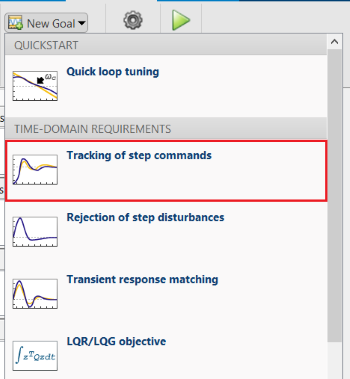
. New Goal Tracking of step commands TIME-DOMAIN REQUIREMENTS. Step Tracking Goal.
.
Specify step-response inputs Specify step-response inputs
Add signal to list → Select signal from model.
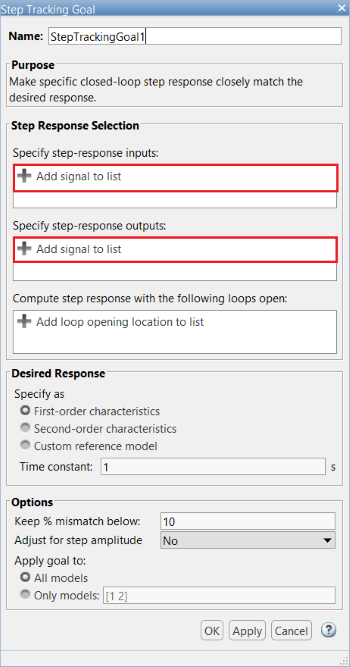
, Reference Position. . Select Signals . Add Signal(s).

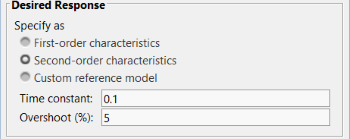
Desired Response . (First-order characteristics), (Second-order characteristics) (Custom reference model). .
Time constant () . Overshoot (%) — (). () () [1]:
, , , 0.1725 . , 0.1 . . .
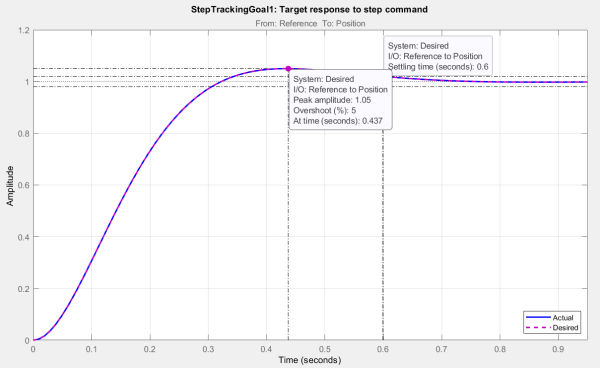
: , .. , , . Tune . Data Browser Data Preview . Tuning Goals , . . , .
CONTROL SYSTEM Update Blocks.

.