
Morcego-ferradura menor
Este projeto descreve a criação do chamado. detector de morcegos - dispositivo que permite ouvir e gravar os sons produzidos pelos morcegos. Você provavelmente sabe que os morcegos emitem ultrassom para ecolocalização. A frequência desses sons está fora da faixa perceptível pelo ouvido humano, portanto, eles não podem ser ouvidos diretamente. O detector de morcegos usa um microfone especial capaz de captar esses sons de alta frequência e convertê-los em sons dentro da faixa audível.
Existem três tipos de detectores de morcegos . Para mim mesmo fiz um heteródinodetector. Sua desvantagem é que isso torna mais difícil distinguir diferentes tipos de morcegos em comparação com a gravação de sons de alta frequência. Explicarei mais tarde como funciona um detector heteródino, mas primeiro vamos dar uma olhada no microfone necessário para gravar ultrassom.
Ao escolher um microfone, a princípio considerei duas opções:
- um microfone de eletreto - tudo o que encontrei, de acordo com os documentos, funciona apenas na faixa de 10 a 20 kHz, mas se você acredita em alguns recursos, então alguns de seus tipos também percebem o ultrassom em alguma medida. No entanto, como suas descrições oficiais não indicam isso, seria preciso muita tentativa e erro para examinar as várias marcas e testá-las. Então, desisti desse tipo de microfone.
- sensores piezoelétricos... Eles são, por exemplo, encontrados nos populares rangefinders ultrassônicos HC-SR04, que são onipresentes e baratos. Sua desvantagem é que sua sensibilidade está muito próxima da frequência de ressonância, algo em torno de 40 kHz. E quando se afasta dessa frequência, a sensibilidade cai drasticamente. Então eles também não se encaixam.
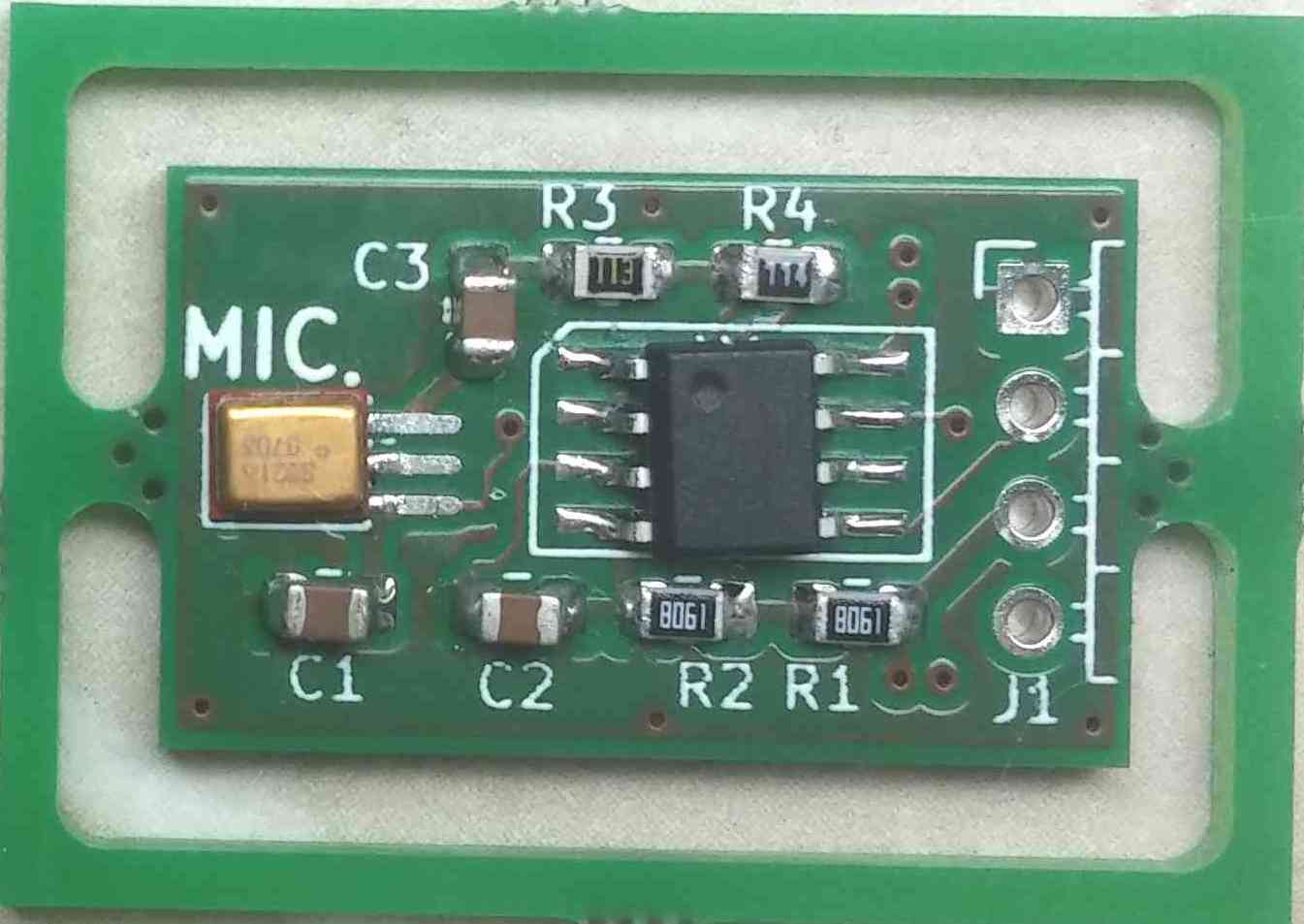
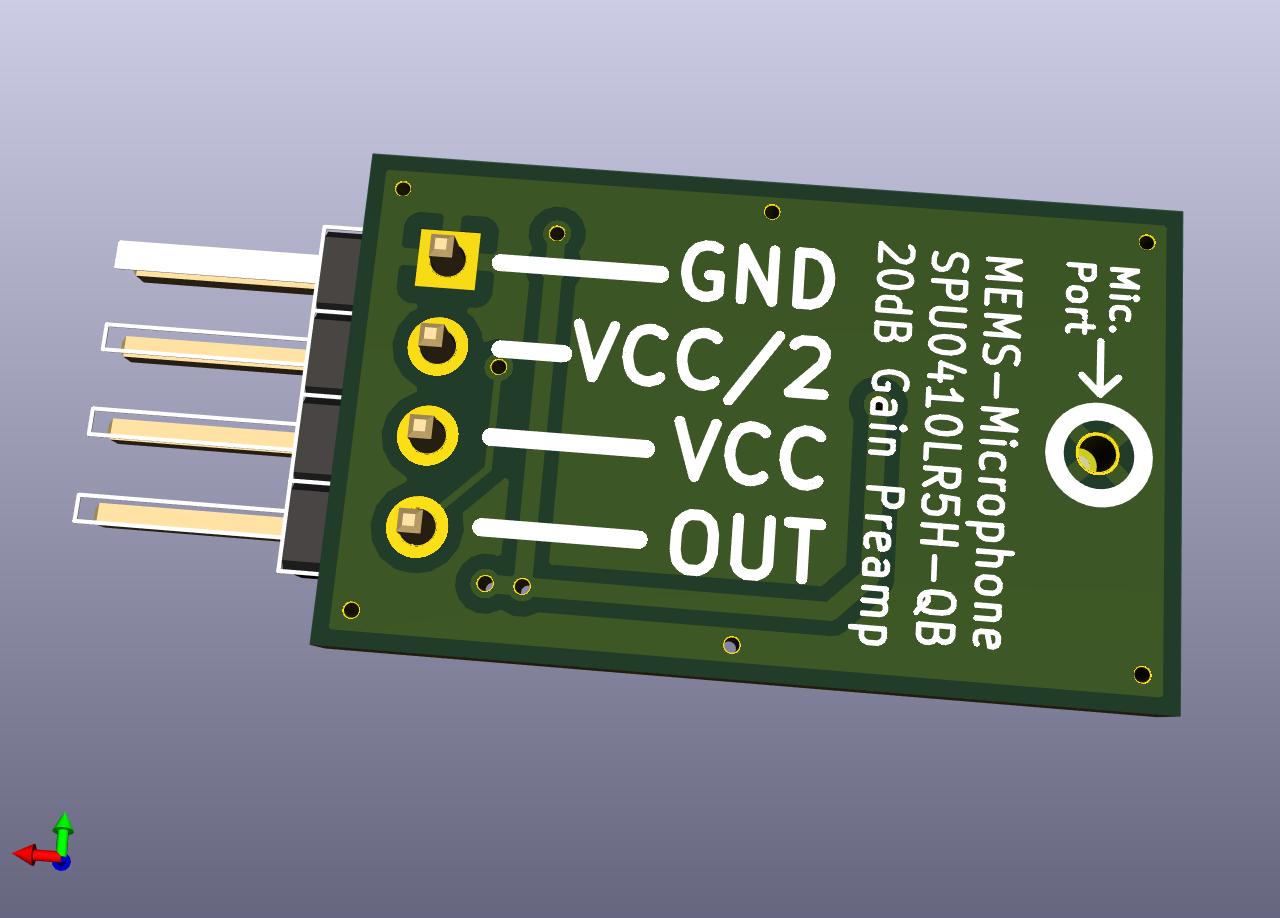
Em vez disso, acabei encontrando um microfone Knowles SPU0410LR5H , um tipo de microfone MEMS... De acordo com a especificação, este microfone tem uma curva de resposta bastante plana em todas as frequências até 80 kHz, por isso é muito adequado para este projeto. Além disso, possui um pré-amplificador interno de alta freqüência. A principal desvantagem deste microfone é que sua caixa não se destina a projetos caseiros. É minúsculo (3,76 x 3 mm!), E seus contatos estão dentro da caixa. Pesquisei na internet e me deparei com a página do usuário hackaday.io Alan Green, que também usou este microfone em seu projeto. Ele teve uma boa ideia de fazer uma placa especial para este microfone, para que pudesse ser soldado à mão. O objetivo é alongar as almofadas para que fiquem fora do componente. Peguei essa ideia e projetei uma pequena placa para um microfone e um amplificador operacional duplo. O último fornece aterramento virtual (na metade da tensão de alimentação), bem como um estágio de amplificador de 20 dB (ou seja, 10 vezes). No começo eu estava cético sobre a soldagem manual deste microfone, mas tudo funcionou bem - todas as 6 placas que eu soldou tiveram sucesso. Gravei um vídeo da soldagem para esclarecimento. O design das placas também é disponibilizado ao público .

Vamos começar explicando o princípio de operação do detector de morcego heteródino. Primeiro, vamos examinar os sinais emitidos por ratos. Eles podem ser modelados como um sinal de frequência portadora ultrassônica modulada em amplitude e um sinal de envelope como um "chirp" curto é o sinal (um sinal com modulação de frequência linear ).
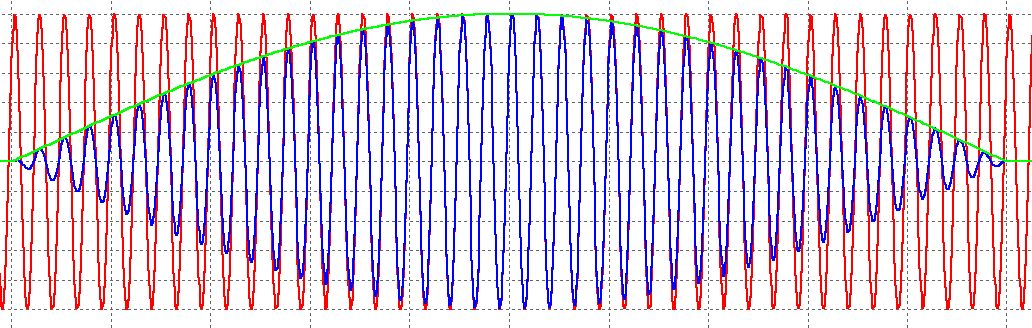
No diagrama de ultrassom, a portadora é mostrada em vermelho, o envelope do chirp é mostrado em verde e a soma total é mostrada em azul. Para traduzir o sinal para a faixa audível humana, é necessário convertê-lo de forma a preservar o envelope (chirp), modulando-o com um sinal portador de frequência inferior (por exemplo, na faixa de 1-5 kHz). Como isso pode ser alcançado?
Para entender como isso é feito do ponto de vista matemático, usamosidentidades trigonométricas conhecidas :
2sin (x) ⋅sin (y) = cos (x - y) −cos (x + y)
2cos (x) ⋅cos (y) = cos (x - y) + cos (x + y)
2sin (x) ⋅cos (y) = sin (x - y) + sin (x + y)
2cos (x) ⋅sin (y) = - sin (x - y) + sin (x + y)
Se tomarmos nosso modelo de sinal de morcegos, pode ser modelado da seguinte forma:
portadora (t) = sin (2πf c t)
chirp (t) = sin (2πf chirp t)
bat (t) = portadora (t) ⋅chirp (t)
onde está a frequência ultrassônica portadora - f c , e a frequência do sinal chirp - f chirp . Para este exemplo, suponha:
f c = 40 kHz
f chirp = 1 kHz
Aplicando identidades trigonométricas, obtemos:
morcego (t) = sin (2πf c t) ⋅sin (2πf chirp t) = 1/2 cos (2π (f c −f chirp ) t) - 1/2 cos (2π (f c + f chirp ) t)
O sinal modulado consiste em duas frequências localizadas simetricamente em torno da frequência da portadora, neste exemplo
40 kHz - 1 kHz = 39 kHz
40 kHz + 1 kHz = 41 kHz
Este é o LSB inferior e a banda lateral USB superior :
f LSB = f c −f chirp
f USB = f c + f chirp
Agora podemos usar o mesmo princípio para converter o sinal do mouse em uma frequência audível mais baixa. Para fazer isso, você precisa multiplicar o sinal pela frequência do gerador LO local - esta é a diferença entre a frequência da portadora do sinal e a frequência da portadora desejada (no nosso caso, a frequência audível na qual gostaríamos de ouvir os gritos dos morcegos). Essa técnica é chamada de heterodinação. Em nosso exemplo, digamos que queremos ouvir os gritos de camundongos a uma frequência de 5 kHz, que é claramente audível para humanos. Então:
f alvo = 5 kHz
f LO = f c −f alvo = 35 kHz
LO (t) = sin (2πf LO t)
Juntando tudo, podemos reescrever os termos das equações usando identidades trigonométricas:
bat (t) ⋅LO (t) = (1/2 cos (2πf LSB t) −1/2 cos (2πf USB t)) ⋅sin (2πfLOt)
= 1 / 2cos (2πf LSB t) ⋅sin (2πf LO t) - 1 / 2cos (2πf USB t) ⋅sin (2πf LO t)
= 1/4 (sin (2π (f LO −f LSB ) t) + sin (2π (f LO + f LSB ) t) - sin (2π (f LO −f USB ) t) - sin (2π (f LO + f USB ) t))
(considerando que sin (−x) = - sin (x)),
= 1/2 (−1 / 2sin (2π (f LSB −f LO) t) + 1 / 2sin (2π (f USB −f LO ) t) + 1 / 2sin (2π (f LSB + f LO ) t) - 1 / 2sin (2π (f USB + f LO ) t))
= 1/2 (−1 / 2sin (2π (fc - f LO -f chirp ) t) + 1 / 2sin (2π (fc - f LO + f chirp ) t) + 1 / 2sin (2π (fc + f LO - f chirp ) t) - 1 / 2sin (2π (fc + f LO + f chirp ) t))
= 1 / 2cos (2πf alvo t) ⋅sin (2πf chirp t) + 1 / 2cos (2πf 2 t) ⋅sin (2πf chirp t)
Pode-se ver que o primeiro termo, cos (2πf alvo t) ⋅sin (2πfchirp t) é exatamente o que queremos, um envelope chirp modulado com uma frequência audível de 5 kHz. O segundo termo é novamente um sinal chirp modulado em uma frequência mais alta, f 2 = f c + f LO , neste caso 75 kHz. O segundo componente está bem fora da faixa audível e é facilmente cortado pelo filtro passa-alta no circuito detector de morcegos.
Agora que temos uma compreensão teórica de como o princípio da heterodinação pode ser usado para construir um detector de morcegos - como o colocamos em prática? O principal é multiplicar o sinal de entrada pelo sinal LO, o que na prática eletrônica não é tão fácil de fazer. Existem circuitos para multiplicação analógica (por exemplo, a célula de Gilbert), e podemos usar um IC adequado (como NE612 ) em conjunto com um gerador de onda senoidal (por exemplo, um gerador de ponte de Wien ). No entanto, tal solução será difícil, e ICs para multiplicação analógica como NE612 ou semelhante são raros e caros.
Acontece que existe uma opção mais simples e pode ser montada a partir de componentes padrão comuns. Podemos montar um misturador de frequência com comutação analógica. Embora este não seja um mixer perfeito, já que na verdade não multiplica ambos os sinais, logo veremos que ele ainda funciona muito bem.
Por enquanto, vamos olhar os diagramas e tentar descobrir como isso funciona.
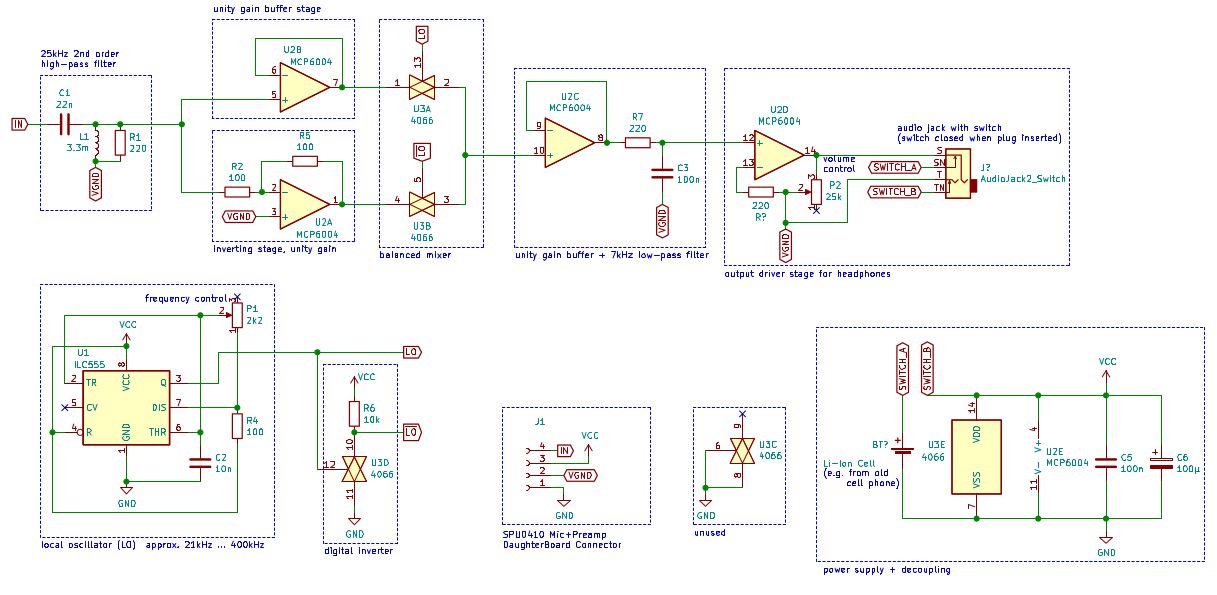
À esquerda no diagrama, a saída do microfone é alimentada para um filtro LC passa-alta de segunda ordem, que remove as frequências audíveis abaixo de 20 kHz e permite que apenas o ultrassom passe (já que é disso que precisamos). O resistor R1, paralelo ao indutor, é necessário - ele amortece a ressonância.
Após o filtro passa-alta, o sinal chega a dois estágios de amplificadores operacionais, com coeficientes de 1 e -1 (ou seja, ele inverte o sinal). Agora temos o sinal do mouse e sua contraparte invertida.
No canto inferior esquerdo do diagrama, você pode reconhecer um multivibrador biestável com o famoso IC 555... O potenciômetro P1 pode monitorar todo o circuito e criar uma onda quadrada com ciclo de trabalho de ~ 50% e frequência variável de 20 kHz a 400 kHz. No nosso caso, será o sinal do oscilador local LO, mas ao contrário do nosso modelo matemático, esta onda é quadrada, não senoidal. O sinal LO chega em um estágio de inversão que consiste em uma chave analógica U3D e um resistor R6. Aqui a chave analógica é usada como inversor digital e, como o IC CD4066 possui 4 chaves analógicas, temos duas sobressalentes, uma das quais pode ser usada como inversor e economizar componentes. Funciona de forma simples: se o sinal LO estiver baixo, a chave está aberta e R6 puxa o sinal de saída da chave para cima. Se o sinal for alto, a chave é fechada e a saída da chave é conectada ao terra. É assim que um sinal invertido é obtido....
Agora vamos dar uma olhada na parte do circuito rotulada como mixer balanceado. O sinal do mouse não invertido é alimentado por uma chave analógica que controla o sinal LO. O sinal invertido é enviado para outra chave, que controla o sinal... As saídas principais estão conectadas. O que essa parte do circuito faz?
Vamos considerar o caso em que o sinal LO é 0 (baixo) e, portanto, o sinal1 (alto). Neste caso, a tecla inferior U3B é fechada e a tecla superior U3A é aberta. Conseqüentemente, um sinal de mouse invertido passa. No caso oposto, quando o sinal LO é 1 (alto) e, portanto, o sinal0 (baixo)., A tecla inferior U3B está aberta e a superior U3A está fechada. Então o sinal não invertido passa. Lembre-se de que essa comutação ocorre em uma frequência f LO determinada pelo loop do temporizador 555.
Esse comportamento pode ser modelado matematicamente? Essencialmente, este circuito de mixer multiplica o sinal por uma onda quadrada que alterna entre +1 e -1. Isso é equivalente a alternar o sinal de saída entre invertido e não invertido. Essa onda (vamos chamá-la de r (t)) pode ser descrita pela chamada. com a função sinal (x):
Portanto, na saída do misturador, obtém-se o produto bat (t) ⋅r (t). Por si só, isso não explica nada ainda - para entender como ocorre a mistura de frequência, precisamos aplicar uma mágica matemática chamada expansão da série de Fourier. Vou poupar você da conclusão e dar o resultado imediatamente. De fato, usando a série de Fourier, pode-se mostrar que:

Portanto, nossa onda quadrada + 1 / -1 consiste em um conjunto infinito de sinusóides com uma frequência fundamental f LO e seus fatores ímpares. O que se segue disso? Se você ignorar a constante 4 / π, poderá ver que r (t) é a soma de LO (t) e outras frequências mais altas adicionais LO 3 (t), LO 5 (t) e assim por diante. A partir de cálculos anteriores, mostramos que:

Portanto, pode ser calculado que:
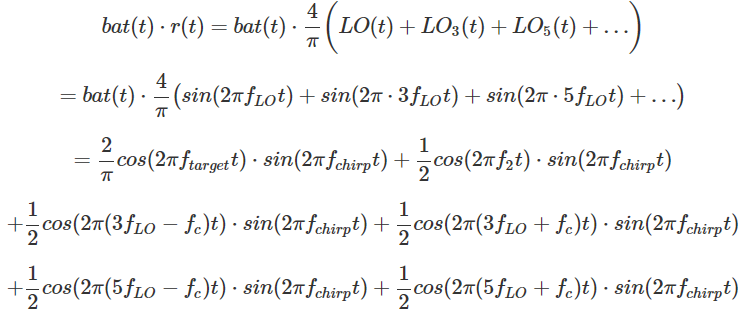
Vemos novamente que o primeiro termo 2 / π cos (2πf alvo t) ⋅sin (2π f chirp t) é o que queremos, no entanto, com nosso mixer analógico comutável imperfeito acabamos com um monte de outros termos desnecessários. No entanto, todos esses componentes de frequência desnecessários têm frequências muito mais altas do que nosso alvo f alvo . Portanto, podemos usar um filtro passa-alta para eliminar esses componentes e obter um sinal final aproximadamente igual a 2 / π cos (2π f alvo t) ⋅sin (2π f chirp t).
Se retornarmos ao circuito, a saída do mixer vai para o estágio de buffer e, em seguida, para o filtro RC passa-baixo com uma frequência de acoplamento de ~ 7 kHz. O último estágio de amplificação fornece um ganho ajustável e serve como um driver de saída (por exemplo, fones de ouvido).
Para entender melhor como funciona a mixagem de frequência, fiz um simulador de circuito no LTSpice . Você pode baixar os arquivos de simulação e brincar com eles.
Algumas notas sobre os componentes. Eu queria que todo o circuito fosse alimentado por uma única bateria de íon de lítio, já que tenho um monte deles de telefones antigos e similares. Portanto, todo o circuito deve operar com alimentação de 3 a 4 V. Portanto, o temporizador 555 e a chave analógica 4066 devem ser selecionados como CMOS - eles já rodam a 3 V. Usei o CD4066B e o ILC555. Um amplificador operacional quádruplo também deve operar em baixa tensão; Escolhi o MCP6004 que uso bastante.
Eu não coloquei a placa, mas soldei tudo na placa de ensaio. Se você quiser fazer seu próprio dispositivo com uma placa, baixe o diagrama para KiCAD... Imprimi a caixa do dispositivo e os botões para ajustar o volume e a frequência em uma impressora 3D. A alimentação é ligada automaticamente quando você insere os fones de ouvido no conector. Um LED vermelho piscando indica que a alimentação está ligada. A placa do microfone está localizada dentro do gabinete atrás de um pequeno orifício (foto à direita).

Para calibrar a escala de frequência, verifiquei a saída 555 em um osciloscópio e marquei as frequências na caixa. Em seguida, desenhei a escala no computador e imprimi.
E é isso que todos nós estávamos esperando. Como soa o grito dos morcegos em um detector? Ofereço a vocês a gravação de um fragmento que gravei por volta das 22h, quando vi o LM voando ao lado de uma lanterna no parque. A frequência é ajustada para 40-45 kHz.
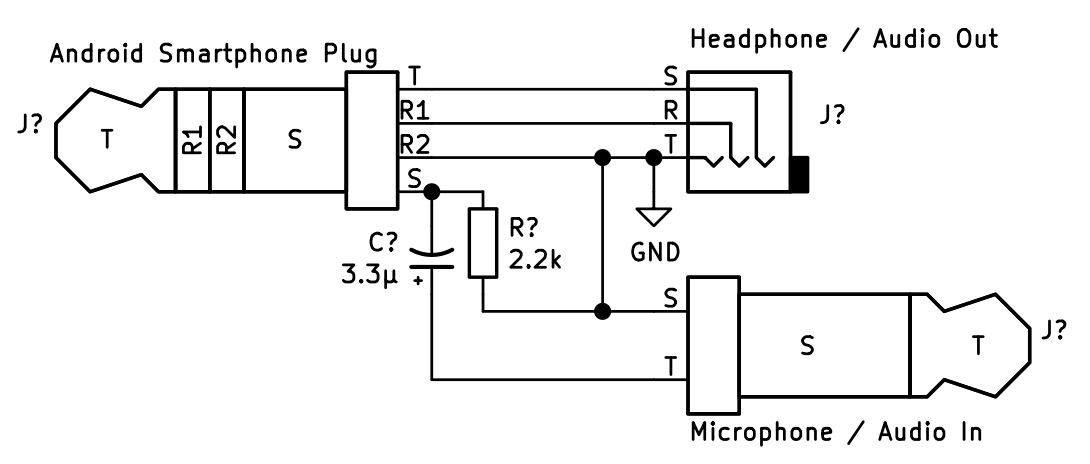
Para gravar o som, segurei meu smartphone ao lado dos fones de ouvido do detector, mas parecia muito bobo, então resolvi procurar uma opção melhor. Descobriu-se que a maioria dos smartphones tem uma entrada de microfone no fone de ouvido - você só precisa usar um pino de 3,5 mm com 4 contatos. Portanto, desenvolvi um adaptador que permite que o detector seja conectado à entrada de microfone de um smartphone e fones de ouvido à saída de fone de ouvido do smartphone. Para que o smartphone reconheça que um microfone está conectado a ele, é necessário um resistor de 2,2 kΩ e um capacitor de 3,3 μF para desacoplar o sinal.

Também tive que procurar um aplicativo que pudesse gravar e tocar áudio ao mesmo tempo, para que eu pudesse ouvir os sons gravados em tempo real. Fiquei feliz com o aplicativo RecForge II , embora provavelmente haja outros.
Se você deseja montar um detector LM heteródino por conta própria e precisa de um microfone MEMS ultrassônico pronto a bordo, você pode encontrá-lo aqui:
Não há amplificador operacional nessas placas, então você também precisará fazer um. O resto dos ingredientes será fácil de encontrar na sua loja preferida.
Veja também: