No 51º aniversário do primeiro pouso humano na lua, em julho de 1969, lembremos da tecnologia fundamental que ajudou a tornar esse pouso possível: o filtro Kalman . Nomeado em homenagem a Rudolf Kalman, engenheiro elétrico americano, matemático e inventor de ascendência húngara, o filtro é uma técnica matemática que ele propôs em 1960. É especialmente útil para estimar a posição de objetos com base em observações com vários sensores e é amplamente utilizado em sistemas de orientação, navegação e controle para veículos e aeronaves.
Foi durante a visita de Kalman ao Centro de Pesquisa Ames da NASA em Mountain View que os engenheiros da NASA viram que os métodos de Kalman poderiam resolver o problema de estimativa de trajetória não linear para o programa Apollo. No entanto, a execução do algoritmo de filtro Kalman em um computador da década de 1960 não era possível. Um memorando técnico (dos arquivos da NASA, veja abaixo) ilustra o trabalho de pesquisa nas décadas de 1960 e 1970 que implementou um “filtro Kalman numericamente preciso em um sistema de computação com restrição de memória adequado para aplicativos em tempo real, como , para navegação a bordo de aeronaves ou naves espaciais. "
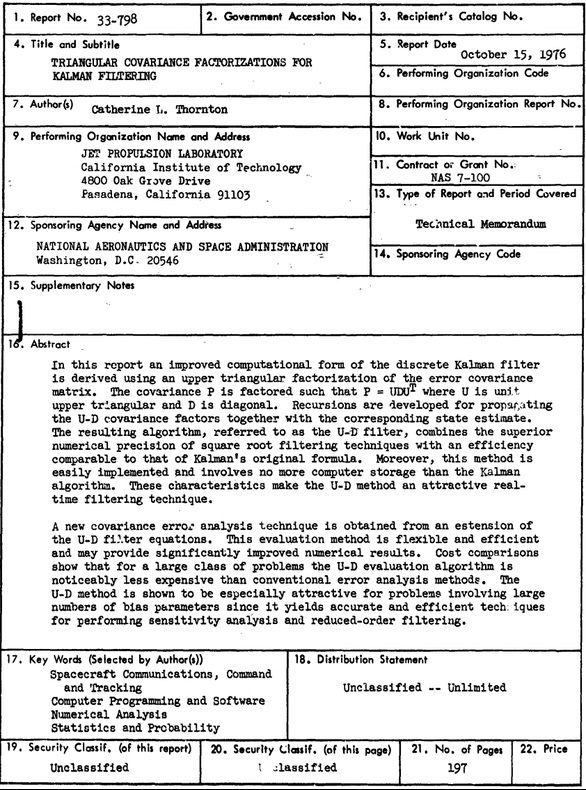
Coeficientes de covariância de três lados para o filtro Kalman (arquivos da NASA)
Outro grande problema com o filtro Kalman há 50 anos foi a falta de estabilidade computacional devido a erros de arredondamento causados pela restrição de 8 bits. Muitas soluções complexas foram desenvolvidas para resolver esse problema.
Os esforços da equipe de engenharia continuaram e, no final, a persistência valeu a pena:
«» 2 , . «» . NASA . , . .
— , «».
Em grande medida, esses feitos de engenharia fizeram da missão lunar um sucesso. Cinqüenta anos depois, o algoritmo de filtragem de Kalman é usado aqui na Terra em muitos campos, incluindo robótica, drones e jogos de realidade virtual. Pesquisadores da Universidade de Tóquio usaram o filtro Kalman em 2014 para fazer o Roomba detectar e evitar com êxito pessoas. O Federal Reserve dos EUA usou o filtro Kalman para determinar taxas de juros neutras a longo prazo e gerenciar a política monetária.
Sebastian Troon, criador do carro autônomo do Google, ensina o tópico do uso do filtro Kalman para rastrear objetos em tempo real para criar carros autônomos. Autoware anunciou o lançamento de um conjunto este mêsalgoritmos de código aberto, incluindo o filtro Kalman, e este conjunto está focado no desenvolvimento de uma implementação de referência de um veículo não tripulado no mundo real.
Ao longo das décadas de existência, várias tecnologias evoluíram juntas e chegaram a um estágio de desenvolvimento que sua combinação torna a direção autônoma possível, útil e valiosa para a sociedade. No entanto, para passar da prototipagem para a implementação comercial, as empresas se esforçarão para padronizar e garantir a interoperabilidade entre componentes - hardware e algoritmos. A interação dos componentes promove a competição, e a competição ajuda a melhorar a qualidade e reduzir custos, aproxima um futuro não tripulado e justifica os bilhões de dólares gastos em pesquisa e desenvolvimento no campo de veículos não tripulados.
Ligações
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: