Lembrando o algoritmo de Dijkstra
O algoritmo de Dijkstra é um dos algoritmos mais populares da teoria dos grafos. É usado para encontrar o caminho mais curto entre os nós em um gráfico direcionado. Começaremos com o nó original e os comprimentos de borda conhecidos entre os nós.
Primeiro, atribuímos a distância da fonte a todos os nós. O nó s obtém o valor 0 porque é a fonte; o resto obtém valores to para começar.
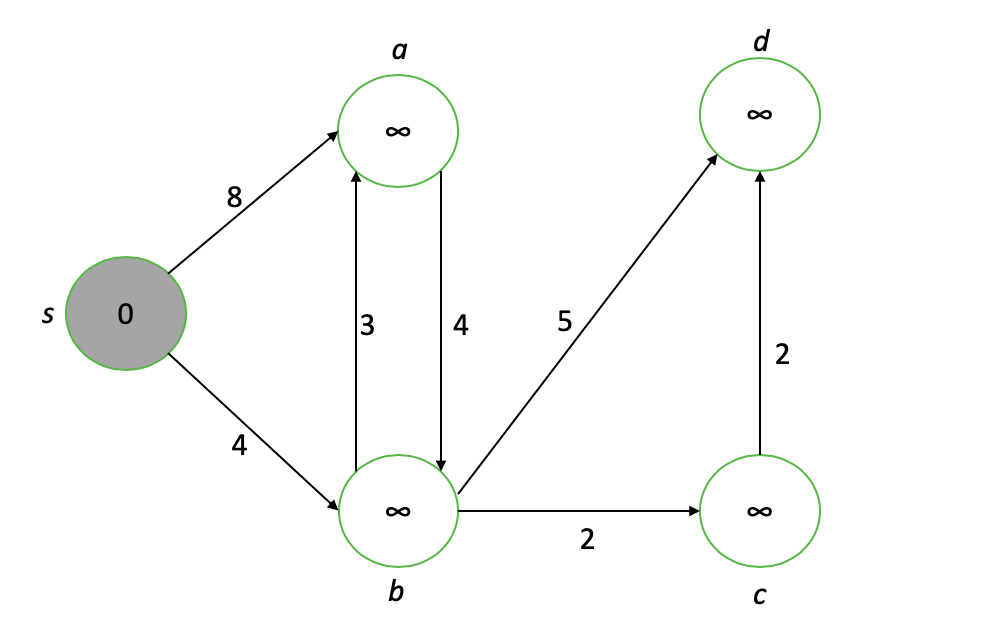
Nosso nó de interesse é o nó bruto com o valor mais baixo (mostrado em cinza), ou seja, s. Primeiro, "enfraquecemos" cada vértice adjacente ao nosso nó de interesse, atualizando seus valores para o mínimo de seu valor atual ou o valor do nó de interesse mais o comprimento da borda de conexão ...
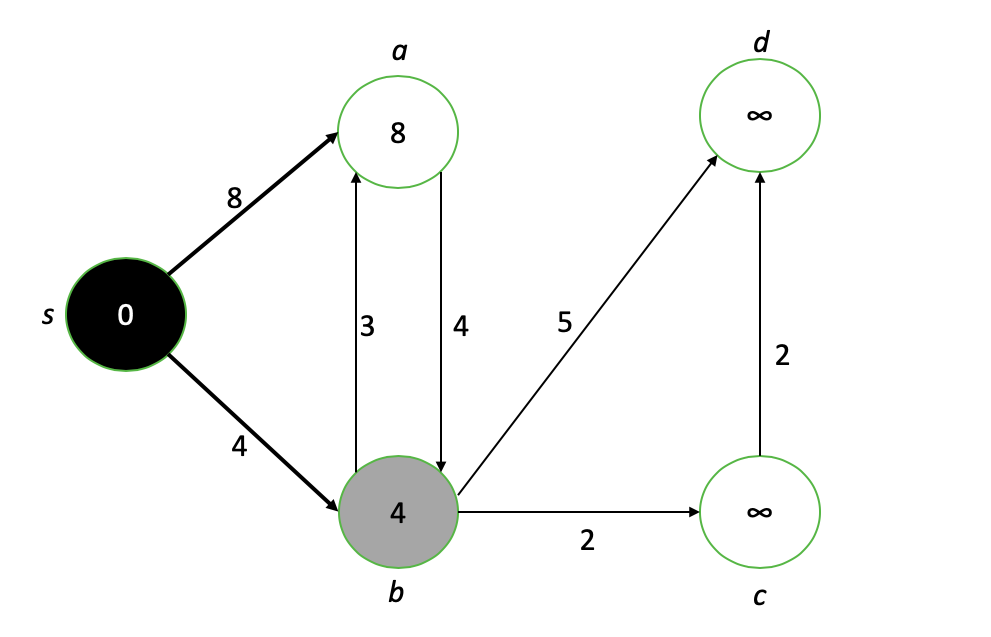
O nó s agora está completo (preto) e seus vizinhos a e b assumiram novos valores. Como o novo nó de interesse é b, repetimos o processo de "enfraquecer" os nós vizinhos de be finalizamos o valor do caminho mais curto para b.

Depois de percorrer cada nó, terminamos com um gráfico que mostra o menor comprimento do caminho da origem para cada nó.
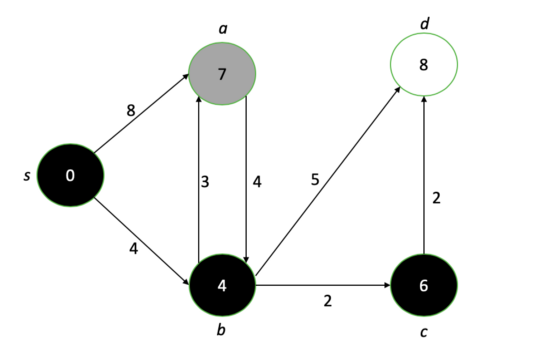


Nosso diagrama final depois de executar o algoritmo de Dijkstra. Os números em cada nó representam a menor distância possível do nó de origem.
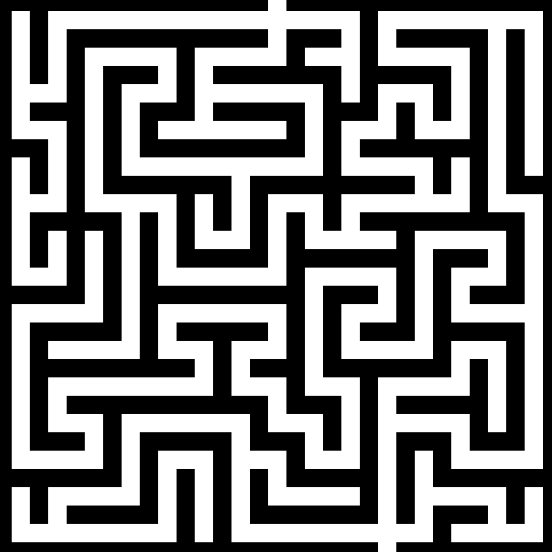
Conceitualizando imagens de labirinto

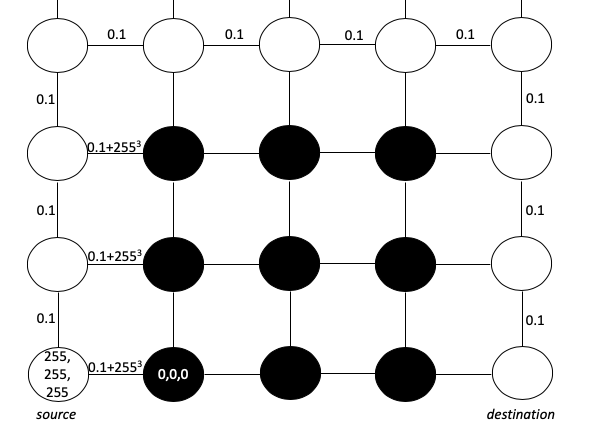
Podemos pensar em uma imagem como uma matriz de pixels. Cada pixel (por simplicidade) tem um valor RGB de 0,0,0 (preto) ou 255.255.255 (branco). Nosso objetivo é criar um caminho mais curto que comece em branco e não ultrapasse as bordas pretas. Para representar esse objetivo, podemos tratar cada pixel como um nó e desenhar arestas entre pixels adjacentes com comprimentos de arestas com base na diferença nos valores RGB. Usaremos a fórmula da distância quadrada euclidiana e adicionaremos 0,1 para garantir que não haja comprimento do caminho 0 - (requisito para o algoritmo de Dijkstra):

Essa fórmula torna a distância de interseção ao longo do limite do labirinto excessivamente grande. Como podemos ver, o caminho mais curto da origem ao destino passará claramente pela barreira e não através dela.
Implementação
Podemos usar o OpenCV, uma popular biblioteca de visão computacional para Python, para extrair valores de pixels e exibir nossas imagens de labirinto. Vamos também definir as coordenadas de nossas localizações inicial e final, adicionando pontos ao nosso labirinto
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread('maze.png') # read an image from a file using
cv2.circle(img,(5,220), 3, (255,0,0), -1) # add a circle at (5, 220)
cv2.circle(img, (25,5), 3, (0,0,255), -1) # add a circle at (5,5)
plt.figure(figsize=(7,7))
plt.imshow(img) # show the image
plt.show()
Estamos criando uma classe Vertex que nos ajudará a rastrear as coordenadas. Também queremos rastrear o nó pai para que possamos restaurar o caminho inteiro assim que encontrarmos os valores de distância.
class Vertex:
def __init__(self,x_coord,y_coord):
self.x=x_coord
self.y=y_coord
self.d=float('inf') #current distance from source node
self.parent_x=None
self.parent_y=None
self.processed=False
self.index_in_queue=NonePrecisamos criar uma matriz de vértices representando o arranjo bidimensional de pixels na imagem. Essa será a base do algoritmo de Dijkstra. Também mantemos uma fila com um monte mínimo de prioridades para o rastreamento de nós brutos.
def find_shortest_path(img,src,dst):
pq=[] #min-heap priority queue
imagerows,imagecols=img.shape[0],img.shape[1]
matrix = np.full((imagerows, imagecols), None)
#access matrix elements by matrix[row][col]
#fill matrix with vertices
for r in range(imagerows):
for c in range(imagecols):
matrix[r][c]=Vertex(c,r)
matrix[r][c].index_in_queue=len(pq)
pq.append(matrix[r][c])
#set source distance value to 0
matrix[source_y][source_x].d=0
#maintain min-heap invariant (minimum d Vertex at list index 0)
pq = bubble_up(pq, matrix[source_y][source_x].index_in_queue)Precisamos de algumas funções auxiliares para nos ajudar a encontrar arestas e o comprimento das arestas entre os vértices:
#Implement euclidean squared distance formula
def get_distance(img,u,v):
return 0.1 + (float(img[v][0])-float(img[u][0]))**2+(float(img[v][1])-float(img[u][1]))**2+(float(img[v][2])-float(img[u][2]))**2
#Return neighbor directly above, below, right, and left
def get_neighbors(mat,r,c):
shape=mat.shape
neighbors=[]
#ensure neighbors are within image boundaries
if r > 0 and not mat[r-1][c].processed:
neighbors.append(mat[r-1][c])
if r < shape[0] - 1 and not mat[r+1][c].processed:
neighbors.append(mat[r+1][c])
if c > 0 and not mat[r][c-1].processed:
neighbors.append(mat[r][c-1])
if c < shape[1] - 1 and not mat[r][c+1].processed:
neighbors.append(mat[r][c+1])
return neighborsAgora podemos implementar o algoritmo de Dijkstra e atribuir valores de distância (d) a todos os vértices de pixels na imagem do labirinto:
while len(pq) > 0:
u=pq[0] #smallest-value unprocessed node
#remove node of interest from the queue
pq[0]=pq[-1]
pq[0].index_in_queue=0
pq.pop()
pq=bubble_down(pq,0) #min-heap function, see source code
u.processed=True
neighbors = get_neighbors(matrix,u.y,u.x)
for v in neighbors:
dist=get_distance(img,(u.y,u.x),(v.y,v.x))
if u.d + dist < v.d:
v.d = u.d+dist
v.parent_x=u.x #keep track of the shortest path
v.parent_y=u.y
idx=v.index_in_queue
pq=bubble_down(pq,idx)
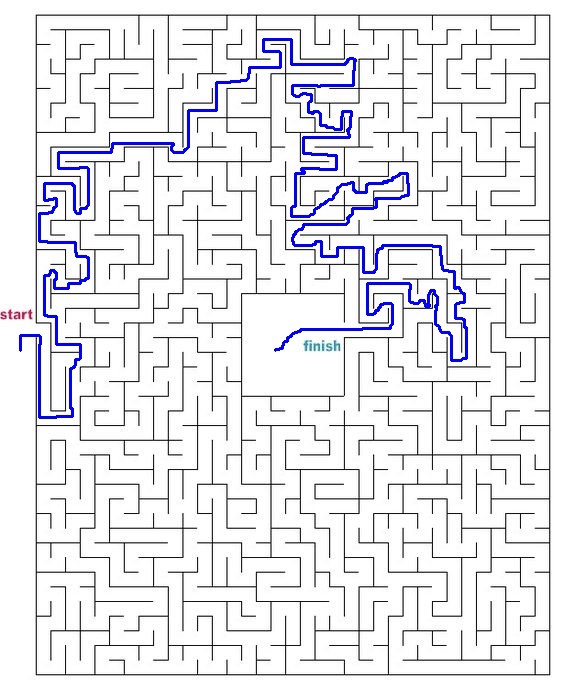
pq=bubble_up(pq,idx)Agora podemos chamar a função de caminho mais curto e desenhar a solução em nosso labirinto:
img = cv2.imread('maze.png') # read an image from a file using opencv (cv2) library
p = find_shortest_path(img, (25,5), (5,220))
drawPath(img,p)
plt.figure(figsize=(7,7))
plt.imshow(img) # show the image on the screen
plt.show()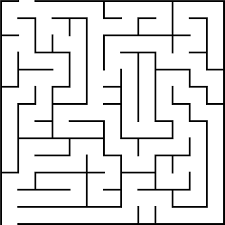

Vamos tentar outros labirintos de toda a internet.


O código fonte completo está disponível no GitHub aqui .
Continuação: Projeto de Aprendizagem em Python: Interface de 40 linhas de código (parte 2)

Aprenda os detalhes de como obter uma profissão de alto nível do zero ou subir de nível em habilidades e salários fazendo nossos cursos online pagos SkillFactory:
- Curso de Machine Learning (12 semanas)
- Treinamento da profissão em Data Science (12 meses)
- Profissão analítica com qualquer nível inicial (9 meses)
- «Python -» (9 )