Eu continuo a desenvolver uma biblioteca de modelos completamente para microcontroladores Stm32, no último artigo eu falei sobre a implementação bem-sucedida (quase) de um dispositivo HID. Outra classe USB popular é a Porta COM Virtual (VCP) da classe CDC. A popularidade é explicada pelo fato de que a troca de dados é realizada da mesma forma que o protocolo UART serial usual e simples, porém, elimina a necessidade de instalar um conversor separado no dispositivo.
Interfaces
Um dispositivo CDC deve suportar duas interfaces: uma interface para gerenciar os parâmetros de conexão e uma interface para troca de dados.
A interface de gerenciamento é uma extensão da classe base da interface, com a diferença de que contém um ponto de extremidade (embora, pelo que eu entendo, sem ter que oferecer suporte a todos os recursos, você pode fazer sem o ponto de extremidade) e um conjunto de "funcionalidades" que determinam as capacidades do dispositivo. No âmbito da biblioteca desenvolvida, esta interface é representada pela seguinte classe:
template <uint8_t _Number, uint8_t _AlternateSetting, uint8_t _SubClass, uint8_t _Protocol, typename _Ep0, typename _Endpoint, typename... _Functionals>
class CdcCommInterface : public Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::Comm, _SubClass, _Protocol, _Ep0, _Endpoint>
{
using Base = Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::Comm, _SubClass, _Protocol, _Ep0, _Endpoint>;
static LineCoding _lineCoding;
...
No caso básico, a interface deve suportar três pacotes de configuração:
SET_LINE_CODING: configuração dos parâmetros da linha: Baudrate, Stop Bits, Parity, Data bits. Alguns projetos que eu estava almejando ( este projeto foi a principal fonte de inspiração ) ignoram este pacote, porém, neste caso, alguns terminais (por exemplo, Putty ) se recusam a funcionar.
GET_LINE_CODING: , .
SET_CONTROL_LINE_STATE: (RTS, DTR ..).
setup-:
switch (static_cast<CdcRequest>(setup->Request))
{
case CdcRequest::SetLineCoding:
if(setup->Length == 7)
{
// Wait line coding
_Ep0::SetOutDataTransferCallback([]{
memcpy(&_lineCoding, reinterpret_cast<const void*>(_Ep0::RxBuffer), 7);
_Ep0::ResetOutDataTransferCallback();
_Ep0::SendZLP();
});
_Ep0::SetRxStatus(EndpointStatus::Valid);
}
break;
case CdcRequest::GetLineCoding:
_Ep0::SendData(&_lineCoding, sizeof(LineCoding));
break;
case CdcRequest::SetControlLineState:
_Ep0::SendZLP();
break;
default:
break;
}
, , variadic-, :
static uint16_t FillDescriptor(InterfaceDescriptor* descriptor)
{
uint16_t totalLength = sizeof(InterfaceDescriptor);
*descriptor = InterfaceDescriptor {
.Number = _Number,
.AlternateSetting = _AlternateSetting,
.EndpointsCount = Base::EndpointsCount,
.Class = DeviceAndInterfaceClass::Comm,
.SubClass = _SubClass,
.Protocol = _Protocol
};
uint8_t* functionalDescriptors = reinterpret_cast<uint8_t*>(descriptor);
((totalLength += _Functionals::FillDescriptor(&functionalDescriptors[totalLength])), ...);
EndpointDescriptor* endpointDescriptors = reinterpret_cast<EndpointDescriptor*>(&functionalDescriptors[totalLength]);
totalLength += _Endpoint::FillDescriptor(endpointDescriptors);
return totalLength;
}
, , , , ( ). :
template <uint8_t _Number, uint8_t _AlternateSetting, uint8_t _SubClass, uint8_t _Protocol, typename _Ep0, typename _Endpoint>
class CdcDataInterface : public Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::CdcData, _SubClass, _Protocol, _Ep0, _Endpoint>
{
using Base = Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::CdcData, _SubClass, _Protocol, _Ep0, _Endpoint>;
...
CDC- , , 4 : Header, CallManagement, ACM, Union, :
template<uint8_t _Number, typename _Ep0, typename _Endpoint>
using DefaultCdcCommInterface = CdcCommInterface<_Number, 0, 0x02, 0x01, _Ep0, _Endpoint, HeaderFunctional, CallManagementFunctional, AcmFunctional, UnionFunctional>;
(Interrupt Bulk ), , , , :
using CdcCommEndpointBase = InEndpointBase<1, EndpointType::Interrupt, 8, 0xff>;
using CdcDataEndpointBase = BidirectionalEndpointBase<2, EndpointType::Bulk, 32, 0>;
using EpInitializer = EndpointsInitializer<DefaultEp0, CdcCommEndpointBase, CdcDataEndpointBase>;
using Ep0 = EpInitializer::ExtendEndpoint<DefaultEp0>;
using CdcCommEndpoint = EpInitializer::ExtendEndpoint<CdcCommEndpointBase>;
using CdcDataEndpoint = EpInitializer::ExtendEndpoint<CdcDataEndpointBase>;
using CdcComm = DefaultCdcCommInterface<0, Ep0, CdcCommEndpoint>;
using CdcData = CdcDataInterface<1, 0, 0, 0, Ep0, CdcDataEndpoint>;
using Config = Configuration<0, 250, false, false, CdcComm, CdcData>;
using MyDevice = Device<0x0200, DeviceAndInterfaceClass::Comm, 0, 0, 0x0483, 0x5711, 0, Ep0, Config>;
, ( ):
template<>
void CdcDataEndpoint::HandleRx()
{
uint8_t* data = reinterpret_cast<uint8_t*>(CdcDataEndpoint::RxBuffer);
uint8_t size = CdcDataEndpoint::RxBufferCount::Get();
if(size > 0)
{
if(data[0] == '0')
{
Led::Clear();
CdcDataEndpoint::SendData("LED is turn off\r\n", 17);
}
if(data[0] == '1')
{
Led::Set();
CdcDataEndpoint::SendData("LED is turn on\r\n", 16);
}
}
CdcDataEndpoint::SetRxStatus(EndpointStatus::Valid);
}
, - USB-, , .
, . , , Seale Logic , . , , , .
WireShark UsbPcap , , . , - . : : "!(usb.addr == "1.1.1" || usb.addr == "1.2.1" || usb.addr == "1.1.3" || usb.addr == "1.5.1" || usb.addr == "1.5.2" || ..)" ( , ). :
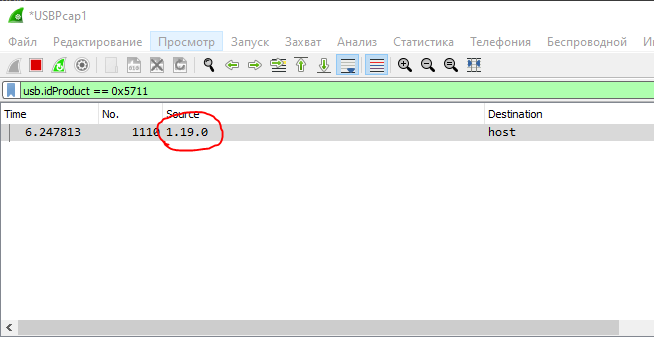
. , PID, GET_DEVICE_DESCRIPTOR. : "usb.idProduct == 0x5711". .
contains. , , (, , ). : "usb.addr contains "1.19"".

, UsbPcap , , .
usbpcap
SSD, Windows 10 To Go (Windows, ). Microsoft , . , , ( ) .
Windows "inaccessible boot device". , , . . , , . , WireShark usbpcap. , / usbpcap. LiveCD Windows . 100%, : Windows , usbpcap, USB, BSOD. , .
Testei o código escrito no programa Terminal v1.9b, a imagem mostra o resultado do envio das mensagens "0" e "1" para o dispositivo.

O código de exemplo completo pode ser visualizado no repositório . Exemplo testado em STM32F072B-DISCO. Como acontece com o HID, a biblioteca volumosa (especialmente o gerenciador de endpoint) tornou muito mais fácil implementar o suporte ao CDC e levou cerca de um dia inteiro para ser concluído. Em seguida, pretendo adicionar outra classe de Dispositivo de armazenamento em massa e provavelmente posso parar por aí. Perguntas e comentários são bem vindos.