Por que decidi escrever este post?
Claro, você pode ver as instruções originais para instalar o ROS Noetic no ROS Wiki , mas tudo está em inglês e é explicado de forma muito vaga, mas tentarei explicar para você da forma mais clara possível. Então, vamos começar.
O que é ROS?
ROS - Robot Operating System, um framework para programação de robôs, provendo funcionalidade para trabalho distribuído. ROS foi originalmente desenvolvido em 2007 com o nome de switchyard no Laboratório de Inteligência Artificial da Universidade de Stanford.
O ROS Noetic pode ser instalado em outras versões do Ubuntu?
Não há uma resposta correta para esta pergunta. Parece que pacotes Noetic individuais podem ser instalados em outras versões do sistema operacional, mas sua estabilidade não é garantida. Portanto, muito provavelmente nem tudo é. Portanto, vamos começar a instalação em si.
E se eu estiver usando uma versão diferente do Ubuntu
O ROS foi desenvolvido em diferentes versões instaladas em diferentes versões do Ubuntu.
Versão Ubuntu |
Versão ROS |
Ubuntu 15.04 e 16.04 |
Ros kenetic |
Ubuntu 18.04 |
ROS Melódico |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
, :
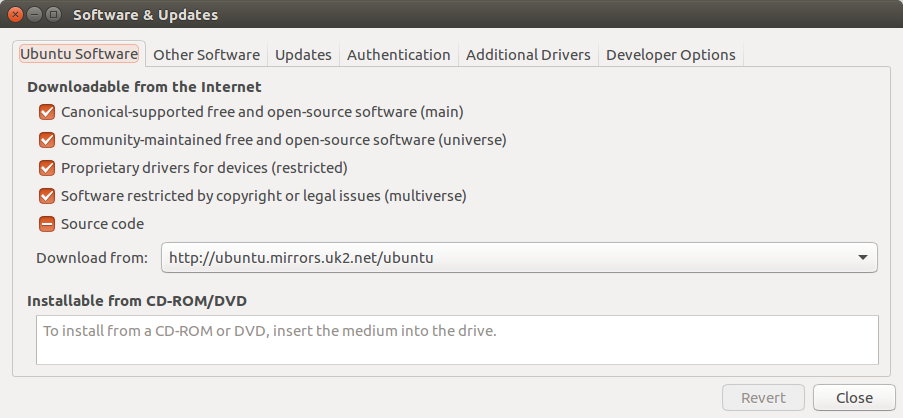
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
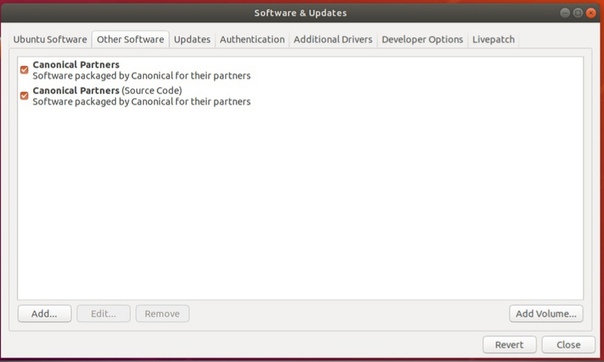
, . " Ubuntu" "Ubuntu Software" ,
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Antes de usar muitas das ferramentas ROS, você precisará inicializar o rosdep . Ele permite que você instale facilmente as dependências do sistema para o código-fonte que deseja compilar e é necessário para executar alguns dos componentes principais do ROS. Se você ainda não instalou o rosdep , é hora de instalá-lo. Para fazer isso, escreva no terminal:
sudo apt python3-rosdep
Etapa 7
Para inicializar o rosdep, escreva no terminal:
sudo rosdep init
E então escrevemos o seguinte:
rosdep update
TOTAL
Parabéns pela instalação do ROS Noetic. Agora você pode começar a programar seus próprios robôs usando ROS.