A NASA revelou recentemente os detalhes do rover Ingenuity, que pousou na superfície do Planeta Vermelho junto com o rover. Em breve, o rover tentará dominar o espaço aéreo de Marte, mas, por enquanto, a NASA está falando sobre os detalhes dessa jornada.
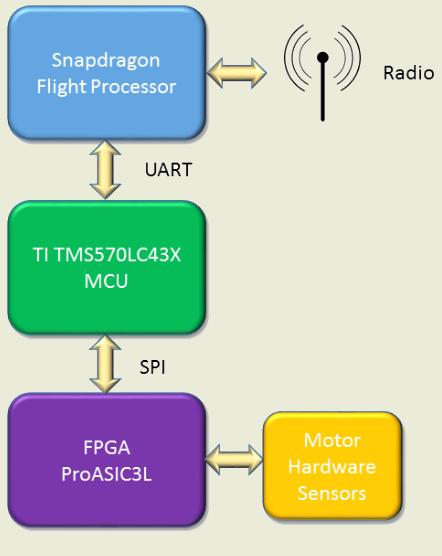
Portanto, o "hardware" do Marsplane é baseado em uma placa com SoC Snapdragon 801 da Qualcomm. Software - Linux e código aberto. Esta é a primeira vez que um software baseado em Linux está sendo usado em sistemas enviados para a Mars, disse a agência. O uso de elementos abertos e acessíveis, tanto de hardware quanto de software, permite aos entusiastas repetir o projeto ou fazer algo próprio.
O hardware oferece o alto desempenho de que um rover precisa. O fato é que o vôo normal requer a operação da malha de controle a uma frequência de 500 ciclos por segundo, além da análise de imagem a uma frequência de 30 quadros por segundo.
SoC Snapdragon 801 (quatro núcleos, 2,26 GHz, 2 GB de RAM, 32 GB de Flash) é responsável pela operação do ambiente básico do sistema baseado em Linux. É ele que realiza operações de alto nível, incluindo:
• Navegação visual baseada na análise de imagens da câmera.
• Gestão de dados.
• Processamento de comandos.
• Formação de telemetria.
• Manter um canal sem fio.
Através da interface UART, o processador é conectado a dois microcontroladores, estes são MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB de RAM, 4 MB Flash, UART, SPI, GPIO. Eles são responsáveis por várias funções de controle de vôo. Além disso, também são utilizados para redundância em caso de falha, de forma que as informações que chegam até eles sejam duplicadas.
Apenas um dos microcontroladores está envolvido, mas se algo der errado entra em operação o segundo, que consegue interceptar imediatamente as funções principais, substituindo o problemático "colega". Pois bem, o FPGA MicroSemi ProASIC3L é responsável pela transferência de informações dos sensores para os microcontroladores, bem como pela interação com os atuadores que controlam as pás do flyer de asa rotativa. Ele também muda para um microcontrolador sobressalente em caso de falha.
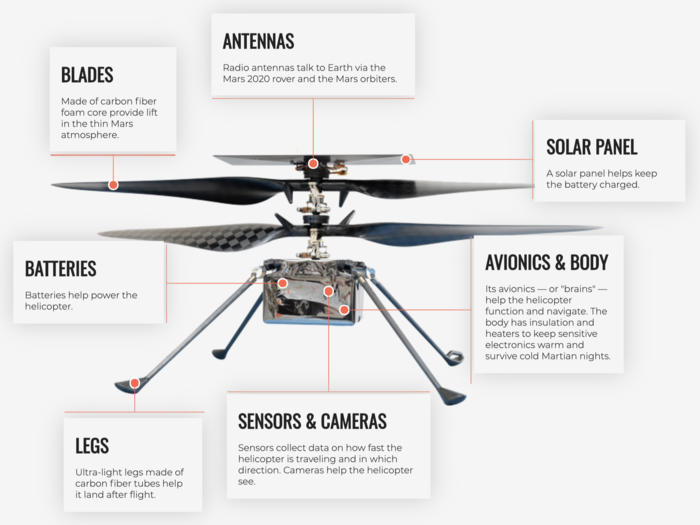
Em nosso artigo anterior, foi dito que não há nenhum equipamento científico neste dispositivo. Mas, é claro, isso não é apenas um vazio voador. A espaçonave de Marte está equipada com um altímetro de laser da SparkFun Electronics. Ela é especialista no desenvolvimento de software livre, além disso, é também uma das fundadoras do próprio termo OSHW, hardware de código aberto. Além disso, o rover é equipado com componentes como um estabilizador giroscópico (IMU) e câmeras de vídeo.
Existem duas câmeras. Um deles, o VGA, é utilizado como dispositivo de navegação, sendo responsável por determinar a posição, direção do movimento e velocidade por meio da comparação quadro a quadro. Já a segunda câmera, colorida, de 13 MP, será usada para fotografar o local. Fotografia aérea em Marte - vivemos no futuro!
A maior parte dos sistemas do foguete foram desenvolvidos por especialistas da NASA, nomeadamente no laboratório NASA JPL (Jet Propulsion Laboratory). Ao mesmo tempo, os componentes usados no projeto não são únicos, mas típicos, são criados especificamente para satélites terrestres artificiais pequenos e ultrapequenos (cubsats) e vêm sendo desenvolvidos há vários anos como parte da plataforma aberta F Prime ( F´), distribuído sob a licença Apache 2.0.
F Prime oferece a capacidade de projetar e implantar rapidamente sistemas de controle de vôo e elementos de software relacionados. Ao fazer isso, o software de voo é dividido em componentes separados com interfaces de programação bem definidas. Além disso, os desenvolvedores têm à disposição um framework C ++ para processamento de filas de mensagens, organização de multithreading, além de ferramentas de modelagem que permitem vincular componentes e gerar código automaticamente.
E o que uma espaçonave de Marte fará em Marte?
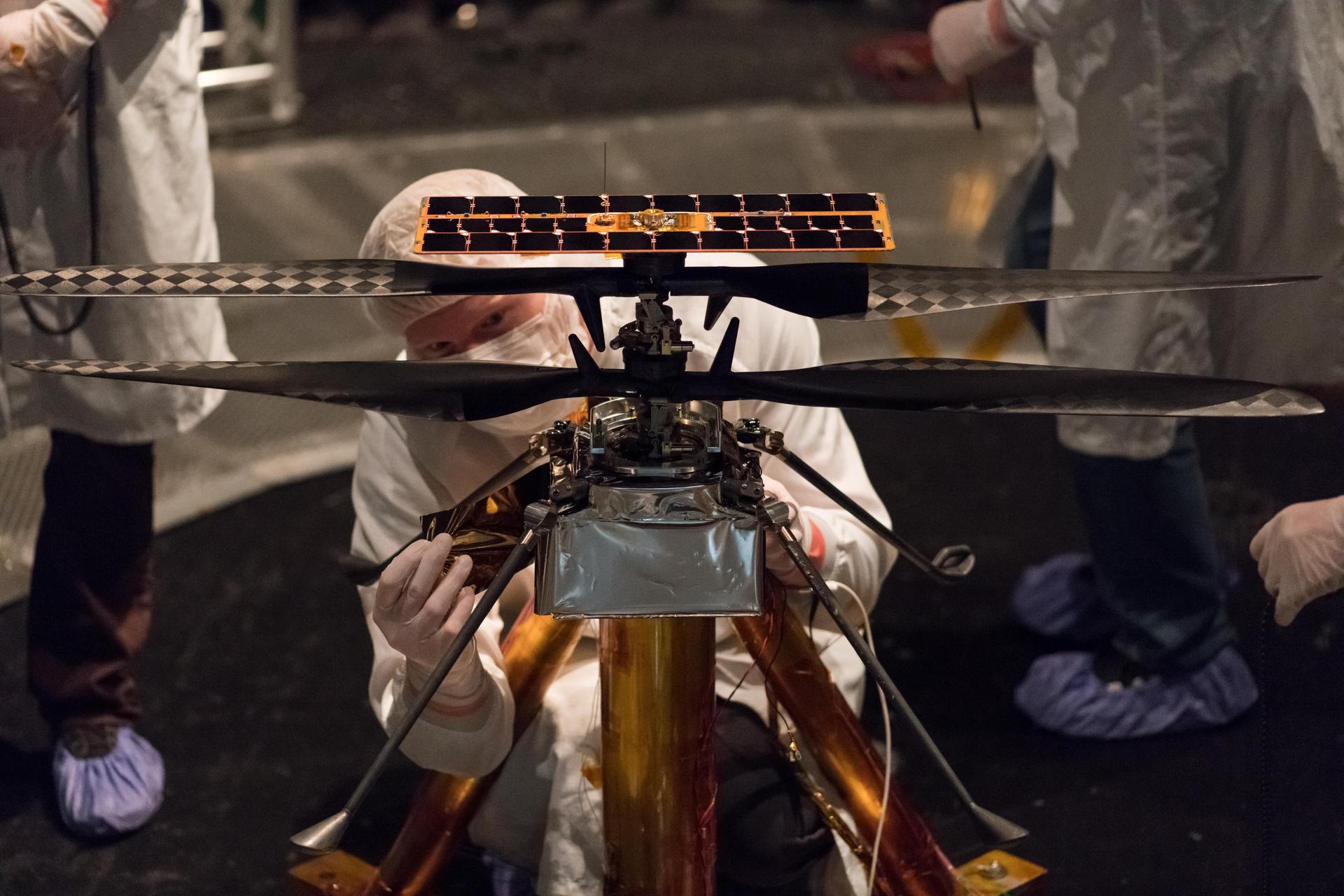
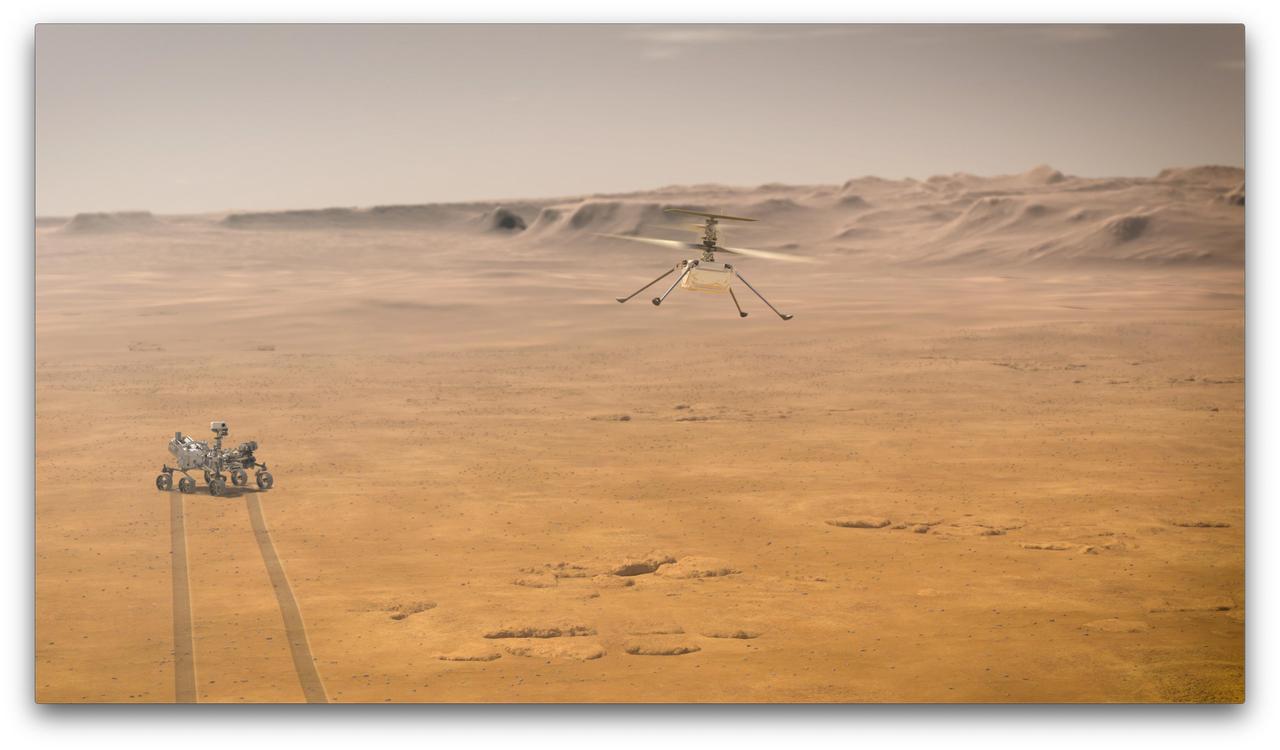
Em suma, ele vai decolar, voar por uma determinada rota e atracar - e tudo isso sem intervenção humana, em modo totalmente automático. O peso do helicóptero é de 1,8 kg, é muito leve, será guiado em vôo por duas hélices de 1,2 m de comprimento feitas de fibra de carbono.
Haverá vários voos, a duração de cada um é de 90 segundos. A espaçonave está localizada a uma distância de cerca de 10 minutos-luz da Terra, então simplesmente não há maneira de controlá-la, não importa o quanto os engenheiros queiram. Os três voos serão realizados em um só lugar - o drone pousará no mesmo ponto as três vezes. A NASA tem cerca de um mês para trabalhar com o drone, então se tudo correr bem, ele pode fazer outro vôo e pousar, pela quarta vez, em um novo local. Pela primeira vez, o drone irá simplesmente decolar e pousar - é simples. E então, se tudo der certo, eles podem colocá-lo em um círculo, tentar voar mais alto e realizar algumas manobras mais "exóticas", segundo os engenheiros.
Por que apenas 30 dias? Porque um drone é uma prova de conceito de tecnologia de decolagem e pouso. Mesmo que tudo corra bem, os cientistas deixarão o rover e assumirão o rover - os recursos do projeto são limitados.
Como mencionado anteriormente, a principal tarefa do drone é provar a própria possibilidade de voar em uma atmosfera rarefeita de Marte (apenas 1% da densidade da Terra) e a eficácia da tecnologia escolhida. Claro, o sistema foi testado na Terra, mas os testes de campo sempre foram o estágio final. Bem, agora o local de teste está a 10 minutos-luz da Terra, o que você pode fazer.

A
espaçonave de Marte vista de baixo Se a espaçonave de Marte decolar, ela tirará várias fotos, que já terão valor científico - não será possível fazer fotos da órbita de Marte nesta resolução. A NASA, se tudo correr bem, poderá enviar um já grande rover a Marte, que será capaz de cobrir as distâncias que o rover agora percorre em dias, em questão de minutos.
