Na ficção científica, especialmente nos clássicos dos escritores americanos de meados do século, os robôs são muito comuns. Na maioria das vezes, eles ajudam uma pessoa, às vezes vivem sozinhos e às vezes até lutam com as pessoas que os criaram. Mas quase sempre - estas são máquinas antropomórficas verticais, com duas pernas e dois braços. É surpreendente como os escritores e roteiristas de cinema tentam persistentemente dotar as máquinas de recursos humanos.
Os robôs modernos são muito mais práticos, eles são adaptados ao máximo para algumas tarefas restritas e parecem tão diferentes dos humanos quanto possível.
Mas existe uma empresa que, apesar de todas as considerações de praticidade, cria robôs que são tão semelhantes a humanos e animais quanto possível - Boston Dynamics. E recentemente eles ensinaram seu robô a dançar!
Veja este vídeo abaixo do corte.
Apesar de todas as dificuldades e inúmeras revendas da empresa em diferentes mãos, a BD não desanima. Ela tem planos ambiciosos. A pesquisa científica anda de mãos dadas com as atividades comerciais, como evidenciado por um vídeo ardente que literalmente explodiu a Internet algumas semanas atrás, na véspera do Ano Novo. No momento, ele tem mais de 25 milhões de visualizações e sua popularidade continua crescendo.
Isso não é computação gráfica, o vídeo é feito com robôs reais que fazem exatamente o que é visto na tela. Os primeiros dois minutos foram filmados em um quadro, sem colagem ou edição. Até mesmo a comitiva é especialmente escolhida para enfatizar o máximo realismo. Esta não é uma cena cromada ou glamorosa. Esta é uma sala de teste de laboratório sem adornos, atrás do qual você pode ver alguns tipos de máquinas e mecanismos, locais de trabalho comuns, marcações no chão para o cinegrafista.
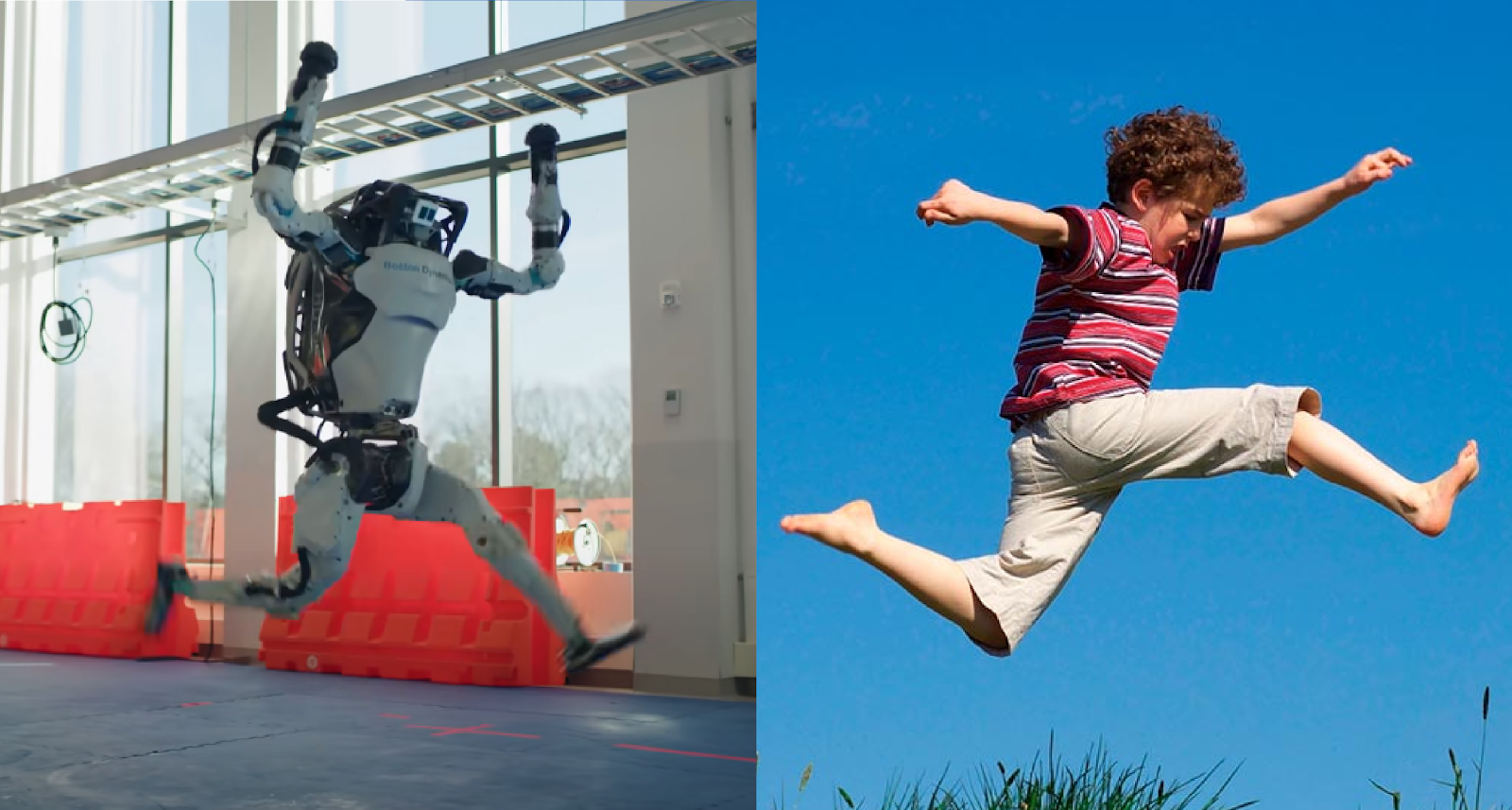
Movimentos graciosos, saltos altos, ações sincronizadas - tudo isso demonstra perfeitamente as capacidades da robótica moderna. Como a Boston Dynamics (BD) alcançou esse sucesso? Neste artigo, apresento um rápido tour pela história da empresa, seus sucessos e fracassos, e também um pouco sobre como essa dança do robô foi filmada.
Quando criança, li uma história de ficção científica em que um engenheiro criava robôs auto-replicantes e de autoaprendizagem, e eles começaram uma pequena guerra entre si, lutando por recursos de alta tecnologia para uma atualização. Nesta história, lembro-me de um detalhe: o primeiro robô, tendo conquistado a independência, substituiu o prático acionamento antigravitacional por pernas primitivas, como a de seu criador. O engenheiro foi categoricamente contra, mas o robô não deu ouvidos aos seus argumentos. Posteriormente, isso fez uma brincadeira cruel com o robô: ele tropeçou durante a batalha e foi esmagado por seus parentes, o que não teria acontecido se ele tivesse saído da antigravidade.
Quase todos os robôs modernos, sobre rodas ou sobre esteiras, são simples e confiáveis. Não há problemas de equilíbrio, a operação é mais frequentemente limitada a salas com piso plano.

Os robôs no armazém Amazon
BD decidiram realizar um sonho de ficção científica:

Robot Atlas
Como tudo começou
A evolução dos humanos e dos animais mostrou claramente como são os membros universais. Com a ajuda deles, você pode caminhar, correr, escalar encostas de montanhas e troncos de árvores, subir escadas. Os primatas foram mais longe nessa versatilidade.
Por muito tempo, a postura ereta não foi dada aos engenheiros. Giroscópios eram muito volumosos, análogos de um aparelho vestibular compacto com feedback não puderam ser criados devido à base técnica eletrônica primitiva. Mas o advento de microcontroladores acessíveis tornou o sonho desse engenheiro realidade. De todos os grupos envolvidos em robôs ambulantes, Boston Dynamics é o mais conhecido.
A inspiração e líder permanente deste laboratório é Mark Reibert .

Mark Reibert
Em 1973, ele se formou em Engenharia Elétrica na Boston Northeastern University e, em 1979, recebeu uma bolsa para desenvolver a primeira Máquina de Salto do famoso cientista e inventor americano Ivan Sutherland .
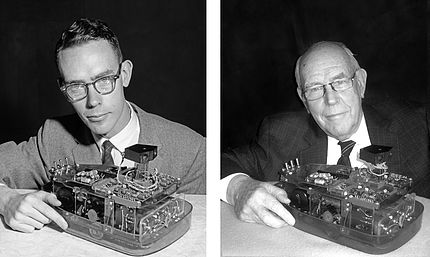
Ivan Sutherland
Em 1980, ele conseguiu interessar a DARPA (então ainda ARPA)em seu desenvolvimento , recebeu o primeiro financiamento deles e abriu o Laboratório de Pernas. Ele foi originalmente localizado na Carnegie Mellon University, onde Mark trabalhou como professor e, depois dele, mudou-se para o Massachusetts Institute of Technology.
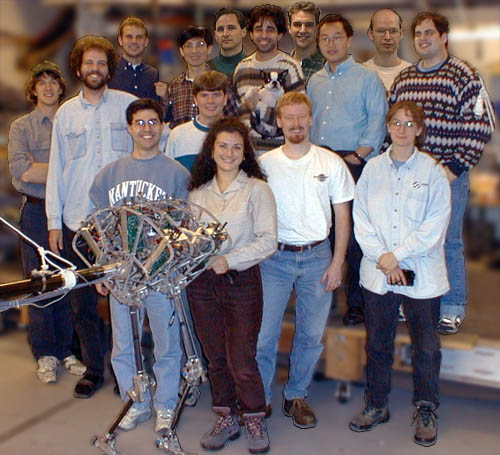
Leg Laboratory
O site do MTI ainda possui uma página desta equipe de pesquisa, criada muito antes das tendências de design moderno e desenvolvimento web. O web1 quente e tubular parece muito comovente. Recomendo vivamente que siga o link e veja onde começou a história desta famosa equipa científica.
Em 1983, seu desenvolvimento estava pronto com o nome de "3D One-Leg Hopper":

O saltador de uma perna poderia se equilibrar ou se mover saltando em uma determinada direção e manter o equilíbrio se tentasse derrubá-lo. Um método incomum de movimento foi escolhido porque é mais fácil calcular o equilíbrio em uma perna.
No próximo vídeo, você confere os robôs criados no Laboratório de Pernas. Todos eles são meramente mecanismos de pesquisa, sem qualquer valor prático, criados exclusivamente para o estudo do trabalho das articulações, acionamentos em um princípio de funcionamento e algoritmos matemáticos de movimento diferentes. Alguns fazem parte de designs mais complexos. Alguns deles não conseguem manter o equilíbrio sozinhos e movimentam-se com a ajuda de uma barra com contrapeso. Robôs "Naked" trazem à mente o filme sobre o Exterminador do Futuro e os interiores do laboratório - a oficina de Jaime e Adam de "Mythbusters"
Mark expressou sua experiência acumulada em pesquisa em seu livro Legged Robots That Balance , publicado em 1986.
Do laboratório à empresa. Trabalho para os militares
O tempo não pára. Para ganhar mais independência financeira, Mark decide deixar a universidade em 1995. Finalmente, ele parte para sua própria empresa, fundada em 1992. O nome desta empresa agora é ouvido até mesmo por aqueles que não estão interessados em tecnologia moderna, graças a vídeos espetaculares que mostram as conquistas da robótica moderna: Boston Dynamics .
Logo no início de sua carreira, Mark recebe financiamento dos militares. A DARPA atribui à sua empresa a missão de desenvolver uma "mula de trabalho" que pode transportar cargas significativas em áreas onde os veículos convencionais não podem passar. Segundo o TK, o robô deve ser capaz de escalar, superar um declive significativo, superar arbustos, passar por superfícies escorregadias e soltas, ou seja, poder fazer tudo que um soldado de infantaria ou ... uma mula é capaz.
Concluir esta tarefa não foi fácil. Somente em 2005 foi introduzido o modelo BigDog .

O projeto era extremamente ambicioso. Foi o primeiro plano desse tipo a ser desenvolvido e seu sucesso na mídia superou todas as expectativas. As notícias sobre o robô podiam ser ouvidas de cada ferro, e muitos vídeos tiveram visualizações recordes.
Até agora, os modelos mais conhecidos de robôs ambulantes eram produtos puramente divertidos quando em movimento, desajeitados e desajeitados. Eles caíram com o menor choque e só podiam se mover em um chão perfeitamente plano. Mas BigDog parecia uma máquina do futuro, versátil e prática. As pessoas ficavam hipnotizadas pelo espetáculo de um mecanismo autônomo caminhando como uma criatura viva e capaz de carregar uma carga significativa. A ideia da empresa de Mark correspondia totalmente à lenda do lendário Arthur Clarke: "Qualquer tecnologia suficientemente avançada é indistinguível da magia." Chegou até ao ponto de as pessoas filmarem paródias desta criatura mecânica:
Infelizmente, o robô não foi tecnicamente tão bem-sucedido quanto o vídeo sugere. Mesmo a segunda geração, lançada em 2008, teve muitas falhas. Em 2013, o Departamento de Defesa dos Estados Unidos se recusou a continuar este programa. Um dos principais problemas era o ruído forte e revelador do motor de combustão interna, do qual os engenheiros não conseguiam se livrar. O segundo problema era que, apesar da implementação formal da atribuição técnica, as características do robô ainda eram insuficientes para participar plenamente em missões de combate reais. A passabilidade era impressionante, mas faltava aos militares. A autonomia era de apenas 30 km, o robô percorreu essa distância na velocidade de um pedestre. Como o robô era tecnicamente extremamente complexo, os protótipos apresentavam sérios problemas de confiabilidade.As primeiras versões mal resistiram a meia hora de trabalho contínuo antes que algo se quebrasse no mecanismo e ele se tornasse incapaz de funcionar posteriormente. Os modelos de robô mais recentes trabalharam com confiança por até três horas, mas isso ainda é extremamente pequeno e é quase impossível consertar um dispositivo tão complexo no campo. O colapso colocaria em risco qualquer operação de combate real se houvesse grandes esperanças por este assistente. Além disso, o robô era muito, muito caro de fabricar.O colapso colocaria em risco qualquer operação de combate real se houvesse grandes esperanças por este assistente. Além disso, o robô era muito, muito caro de fabricar.O colapso colocaria em risco qualquer operação de combate real se houvesse grandes esperanças por este assistente. Além disso, o robô era muito, muito caro de fabricar.
No entanto, embora o desenvolvimento desse modelo tenha sido abandonado, os militares não pararam de trabalhar com o BD. Conforme a pesquisa continua, várias outras variedades de robôs que andam, correm, até mesmo pulam e rastejam.

No pedestal está Little Dog (irmão elétrico mais novo do BigDog), Spot, BigDog, WildCat, LS3 (irmão militar mais velho do BigDog)

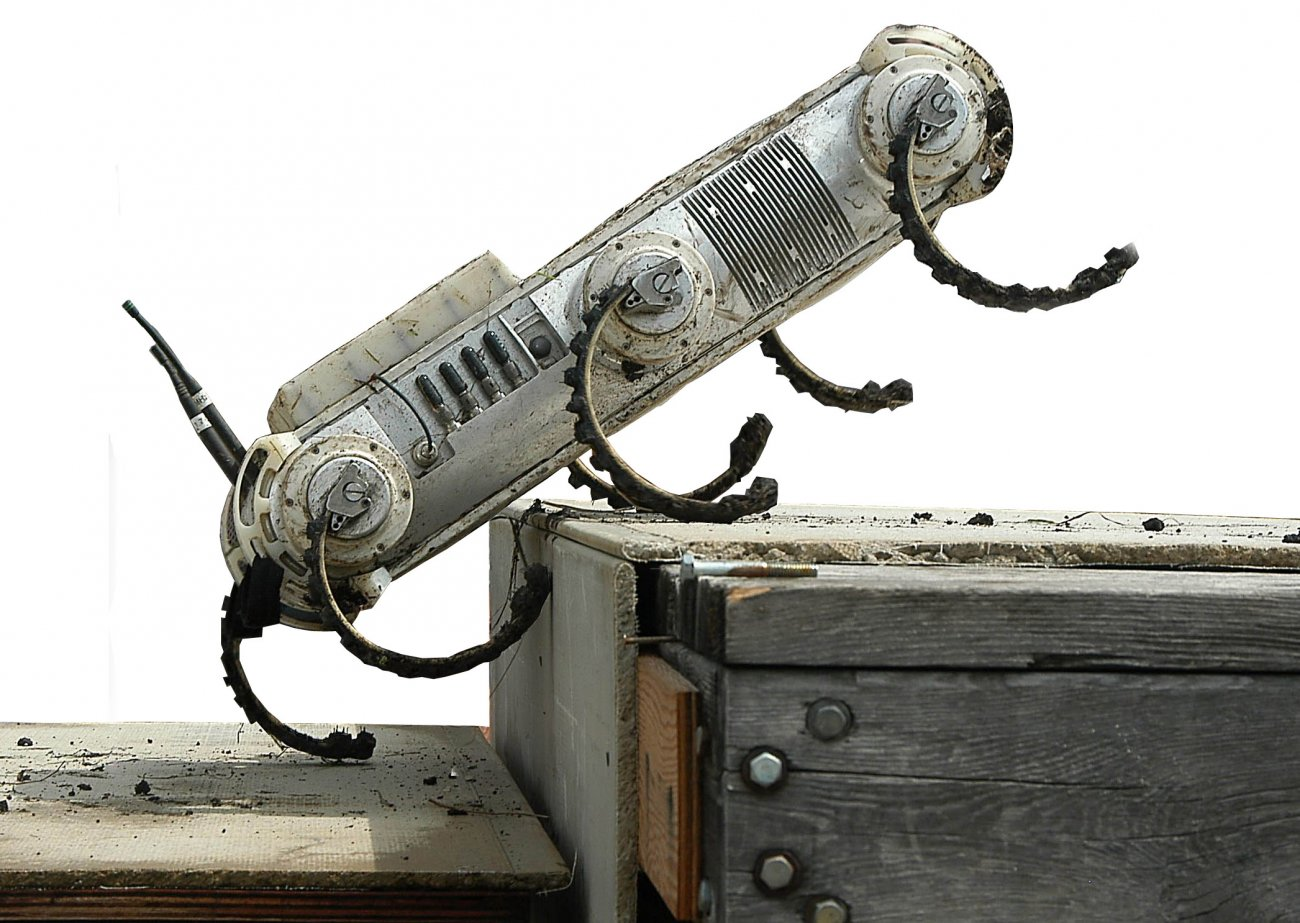
SANDFLEA - Pulga.
Um bebê robô (15 cm de altura) capaz de pular mais de dois metros com uma lata de gás comprimido.
RHEX.
Do tamanho do SANDFLEA, ele pode escalar pequenos obstáculos e rastejar mesmo em terrenos pantanosos.
Questões financeiras
Trabalhando com os militares, a empresa mudou de mãos várias vezes. No final de 2013, o Google comprou a empresa. É difícil dizer por que eles fizeram isso. Talvez apenas no processo de aquisição de empresas diferentes, juntamente com várias outras empresas de robótica e startups, talvez em busca de carteiras de patentes e contando com lucros. Durante a colaboração, BD e Google não conseguiram encontrar uma linguagem comum. Depois que o Google saiu de Andy Rubin, que deu início ao negócio, o futuro da empresa foi suspenso. O próprio Andy disse que ficou desapontado com a velocidade do desenvolvimento, porque mesmo a pesquisa preliminar demorava muito. O gigante da Internet não queria investir tanto dinheiro em uma empresa cujos resultados comerciais precisam esperar 10 anos ou mais. Além disso, o vídeo do mais recente robô humanoide sendo empurrado e derrubado não foi apreciado pelo departamento de publicidade do Google.
(Em 1.22, o robô é empurrado com um taco e "seleciona" a caixa, em 2.04 ele é derrubado com um empurrão nas costas)
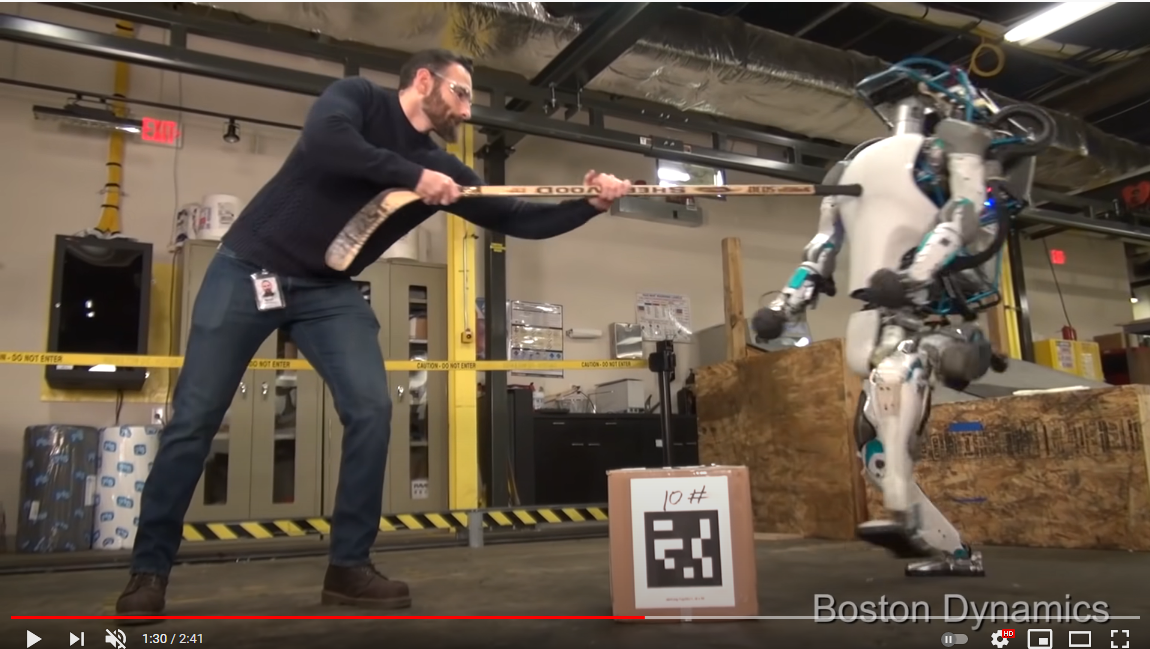
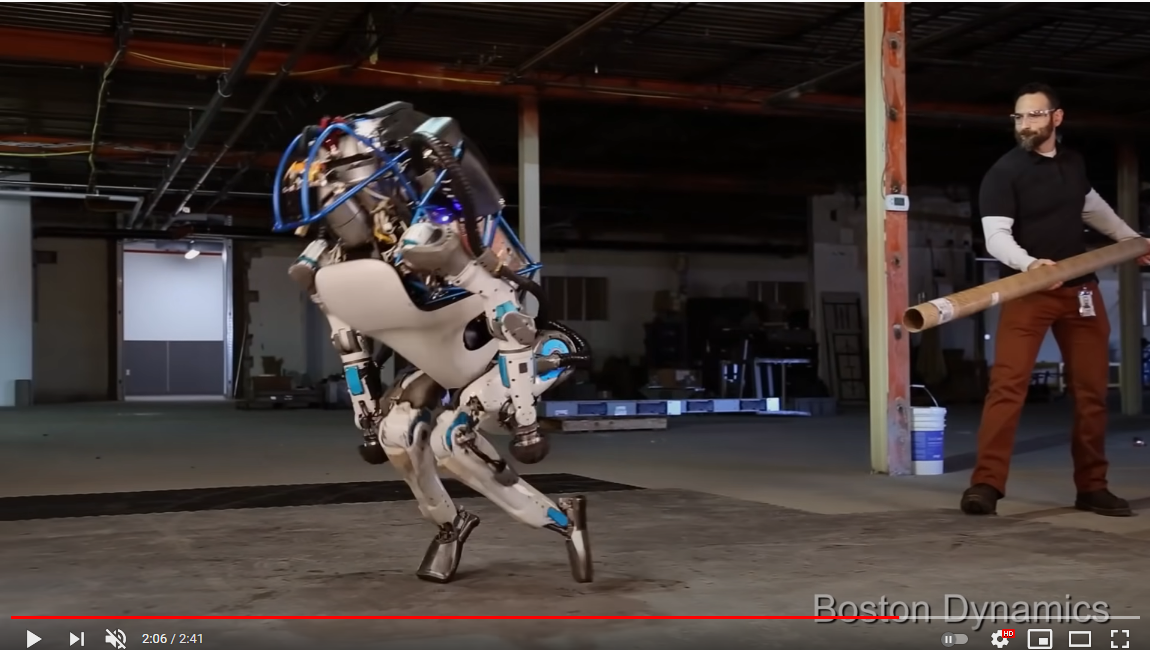
Além disso, a natureza antropomórfica do robô despertou uma empatia incrível entre o público, que viu na demonstração de algoritmos de equilíbrio - zombaria e simpatia pelo robô.
Chegou à internet uma carta escrita pela chefe do departamento de RP do Google Courtney Hone , na qual ela escreve que robôs humanóides incomodam as pessoas por vê-los como uma ameaça, como se esses robôs fossem capazes de tirar seus empregos. Finalmente, em 2016, o Google decide vender o BD. Segundo rumores, a Amazon e a Toyota queriam comprar a empresa. Como resultado, foi para a holding japonesa Softbank.
As aventuras financeiras de BD não param por aí. Mais recentemente, soube-se que a empresa está mais uma vez à venda. Em dezembro do ano passado, Softbank e Hyundai concordaram com uma quantia modesta de cerca de US $ 1 bilhão.
No entanto, tudo isso não impediu o desenvolvimento de novos robôs. Além do Atlas, que era ridicularizado com um porrete, foi desenvolvido um robô com um modo híbrido de movimento: o Handle. As pernas do robô terminam com rodas que permitem que ele se mova rapidamente em uma superfície plana, desça escadas. Ele pode até pular, se necessário.
Primeiro modelo comercial
Mais recentemente, foi aberta uma seção com uma loja no site da empresa , e a BD, pela primeira vez em quase 30 anos, oferece um modelo comercial: Spot. Apesar do nome do cachorro (Spot - uma mancha), o robô é oferecido para uso comercial em instalações industriais e não se destina ao uso doméstico. As dimensões modestas (o robô é um pouco maior que o Pastor Alemão), sugerem possibilidades modestas: apenas uma hora e meia no modo ativo, enquanto a bateria carrega por duas horas.

O design foi muito bem feito. O robô não se parece mais com o Exterminador do Futuro e se move com bastante graça, seus membros não se movem em esteira, como nas versões anteriores dos robôs de quatro patas. Preço base - $ 75.000. É difícil dizer se é muito ou pouco, porque essas ofertas no mercado podem ser contadas nos dedos de uma mão. Apesar da pandemia e da recessão geral, a empresa afirma que já produziu cerca de 400 robôs desse modelo e não vai parar por aí.
Dança
Depois de relembrar a história da empresa e considerar alguns modelos de robôs, pode-se falar um pouco sobre como foi criada a dança incendiária. Para fazer isso, preparei uma versão resumida de uma entrevista com Aaron Saunders , vice-presidente de engenharia da Boston Dynamics, tirada dele pela revista IEEE Spectrum, publicada pelo American Institute of Electrical and Electronic Engineers .
O single rock'n'roll apresentado no vídeo foi gravado pelos The Contours em 1962. A música "Do You Love Me" é uma de suas obras mais famosas. A coreógrafa foi Monica Thomas do MAD KING THOMAS .
Até agora, os robôs e engenheiros da BD nunca haviam feito nada assim. A gama de movimentos disponíveis inclui muitos elementos de caminhada, corrida e salto, alguns exercícios de ginástica e até parkour. Mas ninguém tentou fazer os mecanismos dançarem ainda. Inicialmente, a dança foi criada por meio de um programa de simulação de computador, no qual os movimentos da dança humana foram adaptados às capacidades físicas dos robôs. Depois de selecionar um determinado movimento, a simulação foi mostrada aos engenheiros. Olharam para a tela e disseram algo como: "Vai ser fácil!", Ou: "Vai ser difícil!", Ou: "Isso me assusta!" À medida que trabalhávamos no projeto, foi desenvolvido um conjunto de ferramentas com a ajuda das quais os movimentos de balé dos robôs eram programados em alto nível. Assim, a dança mostrada no vídeo não é um roteiro,onde todos os menores detalhes são registrados manualmente, este é o produto de um pipeline de software que combina elementos desenvolvidos separadamente e os transforma em uma matriz de dados, que são carregados na máquina.
O mais difícil foi programar os movimentos de rotação, porque são os mais diferentes dos elementos que se usam para correr e saltar. Porém, a destreza e o equilíbrio necessários para a execução dos movimentos já praticados mostraram-se suficientes para a programação da dança. Antes desta experiência, o foco principal era o movimento das pernas, pular e correr. Nesse caso, a parte inferior do corpo dos robôs é a mais utilizada. O próximo passo para aumentar a complexidade dos padrões de comportamento é desenvolver movimentos de dança, usando as mãos para empurrar ou puxar. Um dos novos desafios enfrentados pela equipe foi expandir a mobilidade com a parte superior do corpo do robô.
Atlases não usam controladores de aprendizado de máquina, mas usam o que a empresa chama de controle reflexivo (controladores preditivos que trabalham com modelos preditivos que levam em consideração a dinâmica e o equilíbrio, otimizando a trajetória nos modos online e offline).
Esse experimento possibilitou aprender muito sobre a confiabilidade dos robôs e suas capacidades. O robô comercial Spot, em contraste com os modelos Atlas puramente de pesquisa, foi projetado para operação contínua. Ele apresentou excelentes resultados e conseguia dançar o dia todo quase sem manutenção. Apenas algumas cópias dos atlas foram feitas; eles não se destinam a uma operação longa e contínua. Nesse aspecto, eles se assemelham mais a um helicóptero, que tem mais tempo de preparação e manutenção do que de vôo. Um spot é mais como um carro que dirige mais do que serve.
Os atlas tiveram que ser modificados especialmente para este programa, aumentando sua potência. Embora os truques e saltos que esses robôs demonstram sejam muito precisos, os movimentos de dança exigem ainda mais velocidade e força.
É difícil dizer como a empresa se desenvolverá. O próprio Mark não é mais jovem, tem 71 anos. O Google não conseguiu encontrar potencial comercial em BD. Quando a Softbank comprou a empresa, o valor do negócio não foi divulgado, por isso é difícil dizer se a venda da BD para a gigante automobilística coreana foi lucrativa ou não. Parece que nenhum sucesso comercial especial foi observado durante o tempo que a empresa teve com a Softbank. A Hyundai espera usar a empresa para desenvolver pilotos automáticos em seus carros e automatizar a produção. Talvez ela possa obter algum benefício prático da aliança com a BD.
O fato é que Mark e seus colegas são Cientistas, com letra maiúscula. Eles pesquisam em sua forma mais pura, sem pensar em monetizar seu conhecimento. O conhecimento teórico adquirido ao longo de trinta anos é enorme. É muito difícil dizer se eles encontrarão aplicação prática no futuro próximo. Embora pareça que se trata de pesquisa de engenharia aplicada, os trabalhos sobre os quais não foram reivindicados por séculos, que estão longe da física teórica e da matemática superior, eles têm muito em comum. Por exemplo, uma das principais restrições é a nutrição. Chita Robô Experimental nem mesmo foi pensado para uso independente. Era uma bancada de teste para invasão de tecnologia, não funcionava sem uma conexão permanente com a tomada. Para Big Dog, o principal problema era o motor de combustão interna, para Pyatnyshka, autonomia (apenas uma hora e meia, mesmo sem os acessórios) e velocidade de um pedestre.
Talvez o uso de aprendizado de máquina em controladores leve a outro avanço técnico, talvez eles inventem fontes de alimentação mais espaçosas e compactas. O futuro da empresa é difícil de prever. Vamos desejar boa sorte a eles!

