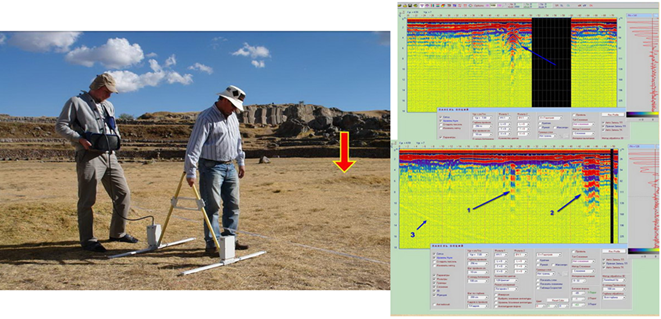
Cerca de 10 anos atrás, encontrei vários estudos em que foi usado um dispositivo que era capaz de ver o que havia no subsolo - o georadar. Durante uma semana não consegui me desvencilhar, assisti a uma quantidade enorme de materiais de vídeo, me lembro do nome do aparelho usado pelos pesquisadores - LOZA GPR. Abaixo está um exemplo de um estudo de Sacsayhuamana (Peru), onde criptas subterrâneas, fossas, uma laje deitada em uma profundidade foram encontradas, e também pode ser assumido que um fundo em forma de tigela foi preenchido uma vez.
Meu primeiro pensamento foi: “Uau, isso é legal! Então você pode encontrar muitas coisas interessantes no subsolo. E não tem outro jeito! " Este foi o início do meu interesse por este dispositivo. Rapidamente ficou claro que custava alguns milhões de rublos, ou seja, nem todos podem pagar. Comecei a pensar como poderia fazer esse dispositivo sozinho.
Pelas informações da internet, tive uma ideia de como o aparelho funciona. Existe um transmissor e um receptor. O transmissor envia um pulso eletromagnético de nanossegundos muito poderoso, abaixo de várias dezenas de quilovolts, profundamente na terra.
Nos locais onde muda a constante dielétrica do meio, ou seja, muda o tipo de solo, seu teor de umidade, ou há uma inclusão estranha, uma cavidade de ar, parte desse sinal é refletido de volta. Outra parte do sinal vai mais longe, mais fundo e é refletida de alguma próxima camada ou objeto.
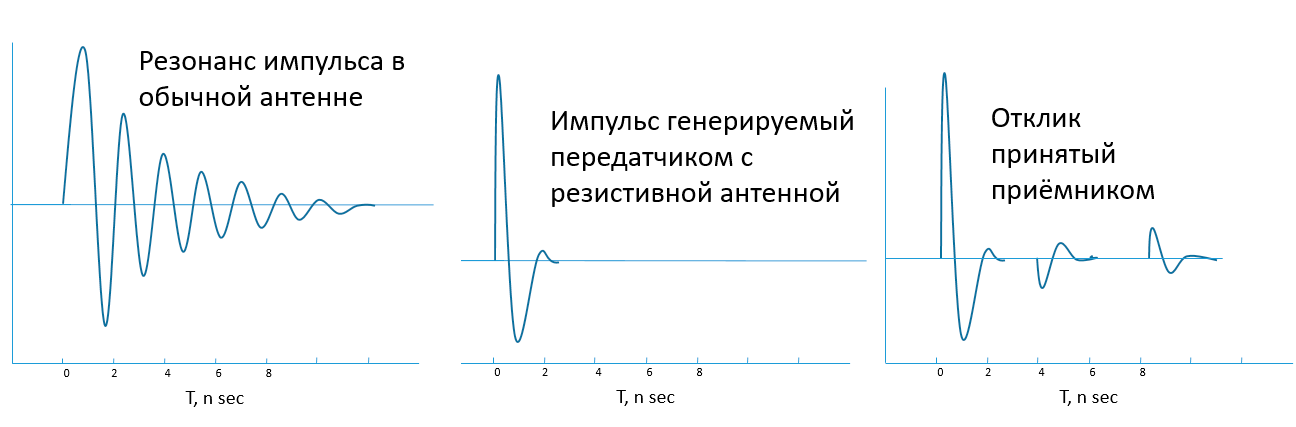
 Várias fontes enfatizaram que as chamadas antenas resistivas (resist) são usadas no GPR. Essas são antenas especiais que não têm "toque" - elas não ressoam. Uma antena convencional (Fig. 1) ressoa (começa a ser forçada a vibrar) em sua própria freqüência de operação. Suas próprias oscilações não permitem que ela perceba qualitativamente os sinais úteis que chegam neste momento. Os pulsos enviados por uma antena resistiva diferem do pulso de rádio clássico pela ausência de uma frequência portadora - pulsos curtos assimétricos são obtidos (Fig. 2). Se um pulso é refletido de um meio com uma constante dielétrica mais alta, ele é invertido (Fig. 3). Comecei a descobrir como fazer essas antenas.
Várias fontes enfatizaram que as chamadas antenas resistivas (resist) são usadas no GPR. Essas são antenas especiais que não têm "toque" - elas não ressoam. Uma antena convencional (Fig. 1) ressoa (começa a ser forçada a vibrar) em sua própria freqüência de operação. Suas próprias oscilações não permitem que ela perceba qualitativamente os sinais úteis que chegam neste momento. Os pulsos enviados por uma antena resistiva diferem do pulso de rádio clássico pela ausência de uma frequência portadora - pulsos curtos assimétricos são obtidos (Fig. 2). Se um pulso é refletido de um meio com uma constante dielétrica mais alta, ele é invertido (Fig. 3). Comecei a descobrir como fazer essas antenas.
O próprio dispositivo também prometeu investimentos: “Este dispositivo é muito caro, porque provavelmente existem ADCs de ultra-alta velocidade caros que permitem uma precisão muito rápida e alta para medir a amplitude do sinal - isso já custa vários milhares de dólares; sem falar em um processador poderoso ”, pensei.
Imagine que poderosos pulsos de 10 quilovolts com 1 nanossegundo de duração se sucedam, saltando repetidamente. A tarefa principal é digitalizar rapidamente todas as informações que chegam ao Receptor (converter de um sinal analógico para "compreensível" em eletrônico, símbolos possíveis para processamento posterior - zeros e uns), analisar e registrar. E esses são gigabytes de zeros e uns por segundo em um fluxo contínuo.
“Para começar, estou implementando este dispositivo em comparadores. Moedas absolutas e múltiplas reduções de preço ”- decidi. Um comparador é um circuito eletrônico muito básico cujo único objetivo é comparar dois sinais analógicos de entrada. Ele produz 0 ou 1 na saída, dependendo de qual das duas tensões de entrada é maior. Ou seja, um comparador é um conversor analógico-digital (ADC) de 1 bit que pode registrar uma forma de onda binária. No entanto, para reconstruir a amplitude total de um único pulso de retorno ao solo, centenas dessas comparações com diferentes limiares de comparador são necessárias. Minha solução de super orçamento não podia se orgulhar de velocidade e eficiência.
Em geral, eu vagarosamente ponderei as abordagens para a implementação do dispositivo até que conheci Vladimir Zubov e comecei a fazer engenharia reversa séria do sequenciador de DNA, sobre o qual publiquei posteriormente um artigo no habr.com . Durante todo esse tempo, continuei acompanhando com interesse a pesquisa do GPR, mas não dava tempo para tudo. Imagine minha surpresa quando uma cadeia de eventos aleatórios me levou ao mesmo ponto de um lado completamente diferente.
 Há três ou quatro anos, mudei-me para morar perto de Troitsk. Só então eu publiquei
um artigo sobre o sequenciador, eu estava sentado lá ordenando as mensagens que chegavam. O próprio
Jonathan Rothbergme ofereceu uma start-up, mas algo deu errado, havia muitas outras mensagens que consumiam muito tempo - em geral, eu estava completamente imerso nas consequências da publicação. Não muito longe de nossa casa no campo havia antenas enormes em mastros (bem, muito saudáveis), muitas vezes íamos lá com um quadrocóptero. Eu me interessei por eles, comecei a pesquisar no google "antenas grandes, Troitsk", me deparei com o site
rk3b.ru com o nome intrigante "Centro de Comunicação do Espaço Escolar", liguei lá e pedi para visitar - o próprio rádio amador.
Há três ou quatro anos, mudei-me para morar perto de Troitsk. Só então eu publiquei
um artigo sobre o sequenciador, eu estava sentado lá ordenando as mensagens que chegavam. O próprio
Jonathan Rothbergme ofereceu uma start-up, mas algo deu errado, havia muitas outras mensagens que consumiam muito tempo - em geral, eu estava completamente imerso nas consequências da publicação. Não muito longe de nossa casa no campo havia antenas enormes em mastros (bem, muito saudáveis), muitas vezes íamos lá com um quadrocóptero. Eu me interessei por eles, comecei a pesquisar no google "antenas grandes, Troitsk", me deparei com o site
rk3b.ru com o nome intrigante "Centro de Comunicação do Espaço Escolar", liguei lá e pedi para visitar - o próprio rádio amador.
 Foi assim que conheci Alexander Nikolaevich Zaitsev, a pessoa mais honrada que dirigia este Centro. Descobriu-se que por muitos anos ele estava estudando a magnetosfera da Terra no IZMIRAN e ao mesmo tempo conhecia toda a elite científica de Troitsk. Conversamos, mencionei, entre outras coisas, sobre meu interesse pelo GPR. Alexander Nikolaevich, por sua vez, me contou sobre as antenas no campo. Acabaram por ser puramente amadores: o conhecido rádio amador V.N.Komarov, sendo ao mesmo tempo um empresário de sucesso, montou uma equipe de entusiastas da comunicação de HF, com seu próprio dinheiro criou um supercentro e tais antenas que se tornaram os melhores do ar. Isto é confirmado pelos primeiros lugares nas competições do Campeonato do Mundo de HF.
Foi assim que conheci Alexander Nikolaevich Zaitsev, a pessoa mais honrada que dirigia este Centro. Descobriu-se que por muitos anos ele estava estudando a magnetosfera da Terra no IZMIRAN e ao mesmo tempo conhecia toda a elite científica de Troitsk. Conversamos, mencionei, entre outras coisas, sobre meu interesse pelo GPR. Alexander Nikolaevich, por sua vez, me contou sobre as antenas no campo. Acabaram por ser puramente amadores: o conhecido rádio amador V.N.Komarov, sendo ao mesmo tempo um empresário de sucesso, montou uma equipe de entusiastas da comunicação de HF, com seu próprio dinheiro criou um supercentro e tais antenas que se tornaram os melhores do ar. Isto é confirmado pelos primeiros lugares nas competições do Campeonato do Mundo de HF.
E depois de um tempo, A. Zaitsev me apresentou a pessoas da VNIISMI Company LLC, que (surpresa! :) estavam envolvidas no LOZA GPR. Encontrei-me com P. Morozov e A. Berkut, que o chefiava. Eles me aceitaram de bom grado e nos demos bem de várias maneiras. Imagine minha surpresa quando eles disseram que seu dispositivo, o LOZA GPR, vendido a um preço de US $ 25.000 na configuração básica, funciona em comparadores. E eles sonharam por muito tempo em fazer um dispositivo em um conversor analógico-digital (ADC), que permitisse que o dispositivo funcionasse rapidamente. E que as tentativas foram diferentes, mas não coroadas de sucesso. Em geral, eles expressaram seu total interesse no desenvolvimento.
Posteriormente, recebi informações completas sobre o funcionamento do georadar LOZA. Na verdade, não havia nada além de comparadores e alguns microcircuitos, o melhor dos quais, entretanto, era o mais avançado na família FPGA há 20 anos. A principal reclamação do VNIISMI em relação ao seu aparelho ficou clara: cansei de apertar o botão com o dedo. Afinal, o que é trabalho em comparadores: para uma medição (medição em um ponto), 128 pulsos devem ser enviados sequencialmente ao solo, o que leva de segundos a 2 minutos, dependendo do transmissor. Ou seja, o dispositivo funciona de acordo com o princípio: apertar o botão, ficar parado e aguardar, mover o dispositivo mais 10 cm ao longo da fita métrica (a fita métrica é realmente espalhada no chão para se mover em incrementos de 10 cm), e assim por diante. Você pode imaginar a velocidade desse trabalho? A propósito, a unidade de controle ou o computador está conectado ao Transmissor com um fio,portanto, são necessárias no mínimo 2 pessoas para a filmagem: a que movimenta o georadar e a operadora que o segue por um fio.
 Também tive a oportunidade de estudar vários georradares diferentes - dispositivos seriais e protótipos de diferentes fabricantes e desenvolvedores.
Também tive a oportunidade de estudar vários georradares diferentes - dispositivos seriais e protótipos de diferentes fabricantes e desenvolvedores.
Por exemplo, esta caixa grande e pesada pesa 5 kg ou mais; no interior existe um ADC para 1800 Megaamostras por segundo, cada placa em uma caixa separada e com uma tela separada - como resultado, muito excesso de peso e grandes dimensões, que inviabilizavam o protótipo a princípio; ele não funcionou.
Outro protótipo foi mais bem-sucedido, mas o problema é que demorou muito para ser configurado; às vezes não ligava, travava. Em geral, um dos problemas de um GPR é a necessidade de operar em uma faixa dinâmica muito grande. O impulso enviado para o subsolo, ao passar por ele, decai muito rapidamente. Para ver a primeira resposta desse pulso e a resposta que veio do solo, você precisa de amplificadores e ADCs que possam receber e distinguir sinais muito fortes e muito, muito fracos. Essa amplitude é chamada de faixa dinâmica. Neste protótipo, um amplificador de dois canais foi usado para isso - um canal do amplificador funcionava com sinais fortes e o outro com sinais fracos. Ou seja, eram 2 canais de digitalização, que, aliás, não puderam ser reunidos de forma alguma. Ajustando o ganho,o dispositivo pode ser ajustado a alguma profundidade e nele ele viu algo. Mas não superior, nem inferior a um determinado nível, ele não viu até que você reconfigure para outros parâmetros. Além disso, o protótipo tinha uma sensibilidade muito alta a interferências.

Então, comecei a projetar meu próprio dispositivo poderoso de alta velocidade. O trabalho foi enorme, mas havia uma boa notícia: parte do trabalho já havia sido feito - tirei como base a eletrônica que (ta-dam! .. :) desenvolvi para o sequenciador de DNA.
O trabalho no GPR e no pacote de software durou cerca de um ano. Consegui não apenas automação total, altas velocidades, a capacidade de controlar o GPR de qualquer dispositivo, consegui criar, de fato, um núcleo universal para qualquer projeto de alta tecnologia: sistema em um módulo (Zturn) → sistema em cristal Zynq → FPGA + CPU + Linux + Django + WebSockets + Javascript ... Vou deixar a intriga, entretanto. Para não cansar o leitor, coloco a parte técnica em um artigo à parte.
 O dispositivo que desenvolvi consiste em 2 dispositivos - um transmissor e um receptor, cada um com sua própria antena. Agora as dimensões dos dispositivos são 22,2 x 14,6 x 5,5 cm, no próximo lote está previsto reduzir ainda mais as dimensões. Para pesquisas em profundidades rasas, são usadas antenas de medidor padrão. Dependendo do comprimento e da potência das antenas, a profundidade da sondagem em solos favoráveis pode chegar a várias centenas de metros. Para movimentar o GPR, pode-se usar um porta-mãos, uma plataforma sobre rodas, antenas de detecção profunda dobráveis / flexíveis com assentos para o receptor e o transmissor; para especial tarefas podem ser criadas por outros meios de movimento (por exemplo, inflável - para o estudo de objetos subaquáticos).
O dispositivo que desenvolvi consiste em 2 dispositivos - um transmissor e um receptor, cada um com sua própria antena. Agora as dimensões dos dispositivos são 22,2 x 14,6 x 5,5 cm, no próximo lote está previsto reduzir ainda mais as dimensões. Para pesquisas em profundidades rasas, são usadas antenas de medidor padrão. Dependendo do comprimento e da potência das antenas, a profundidade da sondagem em solos favoráveis pode chegar a várias centenas de metros. Para movimentar o GPR, pode-se usar um porta-mãos, uma plataforma sobre rodas, antenas de detecção profunda dobráveis / flexíveis com assentos para o receptor e o transmissor; para especial tarefas podem ser criadas por outros meios de movimento (por exemplo, inflável - para o estudo de objetos subaquáticos).
Uma plataforma com um georadar pode ser acoplada a um veículo, o georadar é capaz de levantamento automático em velocidades de até 40 km / h (o que testamos é provavelmente mais). O movimento do aparelho é registrado por meio de um sensor de roda e GPS. Todos os processos são automatizados, o dispositivo é fácil de operar, não requer operador adicional e uma pessoa pode cuidar do tiro. Prioridades: potência, compactação, leveza, refrigeração passiva, possibilidade de complementação com diferentes meios de movimento e antenas de diferentes potências. Essas duas pequenas caixas podem se tornar o coração de um complexo GPR de qualquer potência. Mais chato, especificação:
• Faixa de frequência (MHz) 1-300
• 1000 ( 36 / 1 )
• : ,
• 5
• 1
• : 1GSPS (1)
• 16
•
• 120
• ( ) 16000
•
• 64
• : , ( ), GPS,
• wifi . web , PC
• 4 , (+12 )
•
• 222 146 55 mm ( 2)
• 100Mhz (1,5), 200MHz (1). 10MHz (10), 25Mhz (6), 50Mhz (3) ( , ). – . , / . , , 500 .

O georadar está pronto para funcionar imediatamente - após pressionar o botão "ON", o georadar começará a fazer o levantamento e registrar tudo na memória interna. Pode funcionar de forma totalmente autônoma, sem conectar um operador a ele.
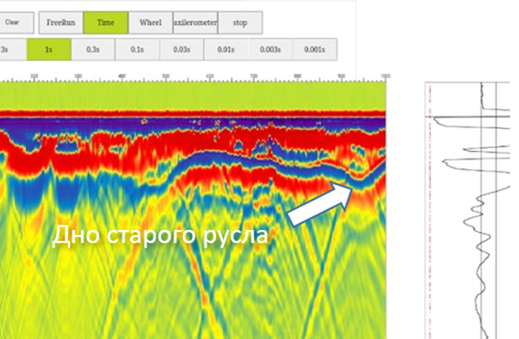
O dispositivo distribui wi-fi, você pode se conectar a ele de qualquer computador, tablet, telefone através de um navegador da web. Você é levado a um programa que permite controlar o dispositivo, alterar as configurações e ver a faixa atual. A linha superior da interface contém vários status que permitem entender o que está acontecendo no momento: tensão da bateria, temperatura do processador, tempo, tempo de operação, dados GPS. Abaixo estão as guias e botões para definir gatilhos, deslocamentos, escala logarítmica, zoom e modos de operação.
O dispositivo pode fazer uma medição pressionando um botão, ou por tempo, por exemplo, a cada 0,3 segundos, ou as medições podem ser sincronizadas com o funcionamento da roda, por exemplo, a cada quarto de revolução da roda é acionado, ou seja, o Transmissor envia um pulso e o Receptor o recebe e escreve. O último modo é muito conveniente, pois permite ligar a plataforma com o GPR à máquina, por exemplo, e fazer medições uniformes independentemente da velocidade do movimento.
 O primeiro lançamento foi realizado em conjunto com representantes da VNIISMI em uma estrada de asfalto em construção no sudoeste de Moscou. Assim ficou a instalação do meu aparelho: 2 antenas na plataforma o mais próximo possível do solo, a caixa branca é o Transmissor, a preta é o Receptor.
O primeiro lançamento foi realizado em conjunto com representantes da VNIISMI em uma estrada de asfalto em construção no sudoeste de Moscou. Assim ficou a instalação do meu aparelho: 2 antenas na plataforma o mais próximo possível do solo, a caixa branca é o Transmissor, a preta é o Receptor.
 Um lugar foi escolhido com antecedência, onde as comunicações estavam em diferentes pontos subterrâneos. O plano era determinar esses pontos primeiro com o dispositivo Loza e depois olhar para o mesmo lugar com meu dispositivo. Enquanto o VNIISMI estava ajustando meu dispositivo, dei meia volta e rodei, e vi tudo. Aqui está a primeira foto do meu dispositivo. Abordamos os operários que ali estavam construindo uma estrada naquela época e conferimos os resultados dos nossos levantamentos com os mapas de comunicação que eles tinham - tudo coincidia, realmente havia tubos de plástico de diâmetro 200 a 2 m de profundidade. Foi um sucesso.
Um lugar foi escolhido com antecedência, onde as comunicações estavam em diferentes pontos subterrâneos. O plano era determinar esses pontos primeiro com o dispositivo Loza e depois olhar para o mesmo lugar com meu dispositivo. Enquanto o VNIISMI estava ajustando meu dispositivo, dei meia volta e rodei, e vi tudo. Aqui está a primeira foto do meu dispositivo. Abordamos os operários que ali estavam construindo uma estrada naquela época e conferimos os resultados dos nossos levantamentos com os mapas de comunicação que eles tinham - tudo coincidia, realmente havia tubos de plástico de diâmetro 200 a 2 m de profundidade. Foi um sucesso.

A imagem abaixo mostra um trecho da mesma filmagem de uma estrada em construção. À direita, você vê uma barra se contorcendo - este é um oscilograma de pulso. O pequeno pico no topo é o pulso gerado pelo Transmissor, e tudo abaixo é o que chega ao Receptor de todas as direções, mas principalmente do subsolo. A grande imagem colorida ao lado do oscilograma de pulso é um conjunto dessas colunas, ou seja, cada coluna de pixel tem 1 pulso, apenas aqui a amplitude é convertida em cor. A barra vermelha na parte superior da imagem colorida está no nível do solo. Além disso, o impulso vai para o solo, e abaixo vemos tudo o que se reflete e voa para o Receptor. As pequenas saliências azul-avermelhadas logo abaixo da segunda faixa vermelha são as interseções dos padrões da antena com objetos de tubo semelhantes a pontos. Ou seja, naqueles locais onde, na direção do movimento do dispositivo, cruzamos tubos,os tubos fornecem essa imagem de rádio e, em alguns lugares, é possível ver dois tubos se aumentar o zoom.
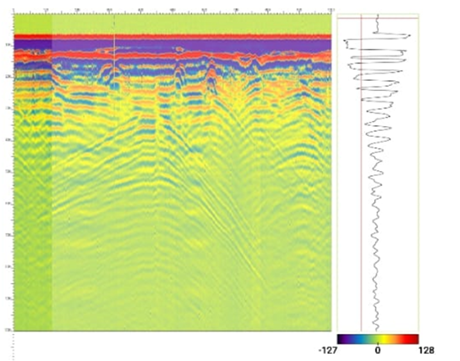 Também aqui você pode ver grandes parábolas borradas que descem até o final da imagem - são reflexos ao longo do canal de ar de vários objetos, neste caso, linhas de energia que estavam próximas. Na minha opinião, este é um grande problema que ainda não encontrou solução nos desenvolvimentos que conheço. Informações sobre reflexos fora do ambiente investigado são claramente supérfluas, distraem a atenção e interferem na interpretação do sinal útil, uma vez que é necessário analisar constantemente o ambiente e decidir se esse reflexo veio do subsolo ou do ar. Portanto, está prevista a utilização de software e hardware para minimizar reflexos no ar.
Também aqui você pode ver grandes parábolas borradas que descem até o final da imagem - são reflexos ao longo do canal de ar de vários objetos, neste caso, linhas de energia que estavam próximas. Na minha opinião, este é um grande problema que ainda não encontrou solução nos desenvolvimentos que conheço. Informações sobre reflexos fora do ambiente investigado são claramente supérfluas, distraem a atenção e interferem na interpretação do sinal útil, uma vez que é necessário analisar constantemente o ambiente e decidir se esse reflexo veio do subsolo ou do ar. Portanto, está prevista a utilização de software e hardware para minimizar reflexos no ar.
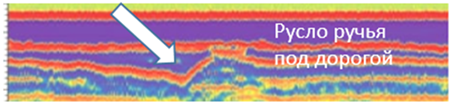 Aqui nesta foto - um riacho, enterrado durante a construção da estrada; o canal pode ser visto a uma profundidade de cerca de 2 metros. Abaixo, nesta seção, também havia grandes parábolas - reflexos dos postes de iluminação ao longo da estrada.
Aqui nesta foto - um riacho, enterrado durante a construção da estrada; o canal pode ser visto a uma profundidade de cerca de 2 metros. Abaixo, nesta seção, também havia grandes parábolas - reflexos dos postes de iluminação ao longo da estrada.
Perto da minha casa existe um rio Neznayka com uma geologia muito interessante, onde tudo parece um livro didático: há um antigo leito de rio, depósitos quaternários, aluvião, terraços de rios. Lá também fomos com o pessoal da VNIISMI, testamos, comparamos o trabalho de diferentes georadares. Aqui, no final, avista-se o antigo leito do rio, e as grandes parábolas verdes são o reflexo da cerca da aldeia vizinha sobre postes de metal.
 Como você pode ver, apenas uma pessoa que já está familiarizada com os princípios de interpretação de tais imagens determinará imediatamente que este é o leito de um rio e este é o reflexo de uma cerca. Portanto, a própria forma de saída de dados limita significativamente o círculo de pessoas que podem facilmente começar a trabalhar com GPR. E aqui, na minha opinião, há uma tarefa muito interessante - traduzir esses dados em uma imagem que qualquer usuário possa entender. Essa tarefa pode ser realizada por meio de inteligência artificial (redes neurais), que podem ser treinadas para marcar, designar os contornos reais dos objetos e assumir sua finalidade e propriedades. As construções volumétricas também ajudarão a resolver o problema dos dados ilegíveis, mas falaremos mais sobre isso posteriormente.
Como você pode ver, apenas uma pessoa que já está familiarizada com os princípios de interpretação de tais imagens determinará imediatamente que este é o leito de um rio e este é o reflexo de uma cerca. Portanto, a própria forma de saída de dados limita significativamente o círculo de pessoas que podem facilmente começar a trabalhar com GPR. E aqui, na minha opinião, há uma tarefa muito interessante - traduzir esses dados em uma imagem que qualquer usuário possa entender. Essa tarefa pode ser realizada por meio de inteligência artificial (redes neurais), que podem ser treinadas para marcar, designar os contornos reais dos objetos e assumir sua finalidade e propriedades. As construções volumétricas também ajudarão a resolver o problema dos dados ilegíveis, mas falaremos mais sobre isso posteriormente.
A imagem abaixo mostra um relevo muito interessante (filmado em 22 de julho de 2020 na região de Ivanovo, aldeia Kalinkino): algum tipo de estrutura oblonga é visível - provavelmente é uma camada de areia ou outra menos densa do que a argila e o solo prevalecente em nossa área. Tenho uma ideia para automatizar totalmente a identificação de camadas. Como definimos acima, a onda é refletida daqueles lugares onde a constante dielétrica do meio muda. Podemos medir a velocidade do pulso em uma ou outra camada desta imagem e assumir a composição do ambiente e / ou o grau de sua umidade.

No final do verão, consegui participar de uma expedição arqueológica perto de Ryazan, perto da aldeia de Terekhovo, distrito de Shilovsky, para o local de um acampamento / assentamento do século V. Ali, na convergência de dois rios, há um morro coberto de árvores - são inúmeras as evidências de que no século V havia um Povoado. Começamos a caminhar até lá com um georadar - na primeira foto, nossa trilha de GPS. As árvores cresciam muito densamente no centro, podíamos caminhar ao longo do perímetro, havia menos árvores adiante e todos nós andávamos com bastante densidade. Tive a oportunidade de usar um programa que foi anunciado como um programa que permite construir um modelo 3D a partir de penetrações lineares. Os arqueólogos esperavam de mim esse resultado - “vamos construir e ver claramente o que está enterrado onde”. É melhor fazer essas construções em áreas bem (densamente) preparadas.Carreguei a área com as passagens mais densas no programa e entrei no modo 3D - o programa construiu um campo de barras de cores que podiam ser "puxadas" para cima e para baixo, alterando as configurações, não vi mais possibilidades - após consulta, descobri que o programa cria apenas pseudo 3D.
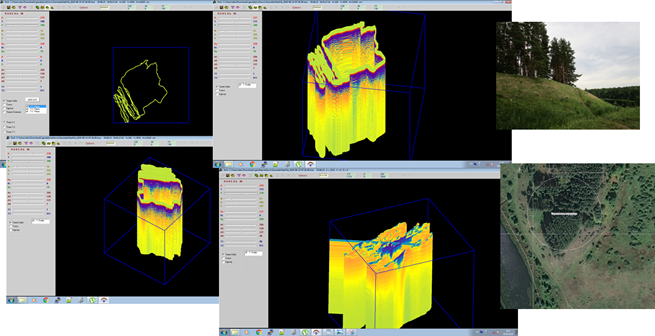
Imagine que temos algumas colunas que conhecemos, por onde o GPR viajou de cima, e sabemos que ele está localizado verticalmente para baixo neste ponto. A próxima tarefa é completar as colunas ausentes por aproximação, que é o que o programa fez. Mas ela fez isso brega com uma grade ao longo de 2 eixos. Como resultado dessa construção, surgem vários artefatos - cruciformes, de linhas horizontais e verticais. Se pegarmos uma fatia de um plano 3D, teremos uma imagem colorida de uma fatia de colunas, que o programa simplesmente puxa para cima ou para baixo, dependendo da amplitude do sinal.

A construção 3D real é um pouco mais complicada - a partir de pontos fisicamente filmados em diferentes profundidades, precisamos identificar certos planos, planos de transição de um para o outro e, em seguida, usando a interface do usuário, sermos capazes de selecionar os planos individuais que precisamos exibir.
Construir um modelo volumétrico geralmente é uma tarefa separada muito interessante. Agora estou pensando na ideia de usar uma antena com um Transmissor e 2 antenas com Receptores espaçados um do outro, ou seja, 2 Receptores. Acontece uma espécie de antena phased array. No momento em que o sinal viaja, mais precisamente pela diferença na hora em que foi recebido pelo primeiro e segundo Receptores, você pode determinar o local exato onde esse sinal foi refletido. Assim, em uma medição, medindo um único pulso, podemos construir imediatamente uma imagem em um plano 2D. O radar convencional usa frequências portadoras, transformadas de Fourier, plotagem de seno e cosseno. Neste caso, alguma matemática excelente é usada:Com base nos dados da reflexão de um único pulso de nanossegundo, fazemos uma convolução e, em seguida, calculamos de onde esse pulso veio e com que probabilidade. Esta ideia encontra-se agora em fase de escrita de software, que permitirá imediatamente durante a passagem simular uma imagem 3D, bem como medir a velocidade de passagem de um pulso em camadas, o que nos permitirá assumir de imediato a composição e qualidade do suporte.
Onde o GPR pode ser usado?
As camadas superiores sob a superfície da terra são chamadas de "camada cultural" - isto é arqueologia, objetos individuais, fundações de edifícios são perfeitamente visíveis, mesmo cavadas e uma vez que os poços são visíveis. Portanto, existe um problema muito interessante associado, por exemplo, ao Deserto do Saara. O Saara está se expandindo e muitos arqueólogos concordam que cidades e edifícios estão enterrados sob suas areias. Nos dias do Egito, havia uma savana, rios corriam, animais viviam. O GPR pode digitalizar tudo para o solo e encontrar edifícios e assentamentos lá. Na verdade, este é o único dispositivo capaz de fazer isso.
A propósito, a profundidade de varredura depende da densidade e tipo de solo, sua mineralização e teor de umidade. A areia é o solo em que o GPR vê mais profundamente. O segundo meio, muito permeável ao GPR, é o gelo. Portanto, o GPR pode ser usado para sondagem subterrânea de corpos d'água. Na água salgada, a profundidade da sondagem será mais rasa, na água doce será mais profunda e a sondagem mais profunda pode ser feita no gelo.
Outra aplicação do GPR é a busca de utilidades subterrâneas, tubulações, passagens, túneis. A qualidade da construção de estradas pode ser controlada de forma muito eficaz - a espessura do substrato de areia foi colocado, se o asfalto foi colocado uniformemente. Você também pode verificar o estado das fundações e paredes dos edifícios. É possível monitorar o estado da estrada durante a operação, a fim de tomar medidas oportunas em caso de deterioração da estrada, formação de cavidades cársticas, enquanto isso ainda não levou a uma falha. A erosão ocorre sob as fundações de edifícios e estruturas. Portanto, o motivo do derramamento de óleo em Norilsk foi que a base do armazenamento de óleo foi prejudicada. A verificação regular de tais objetos ajudaria a prevenir tais desastres.

Geologia. Durante os levantamentos de georadar, os limites dos rios, afloramentos de calcário, onde as camadas de rochas estão localizadas, são claramente visíveis, tubos de kimberlito, morenas. Por indicadores indiretos, a água subterrânea pode ser determinada. Portanto, a água desce até encontrar alguma camada através da qual não pode penetrar e se acumula na borda das camadas na planície. Também é possível prever e prevenir fluxos de lama, deslizamentos de terra. O GPR pode ser útil na exploração mineral, incluindo perfuração.
Em dezembro de 2020, a versão básica do dispositivo foi testada e certificada com sucesso. O radar de penetração no solo foi denominado GEORA.
O primeiro pequeno lote está sendo preparado para lançamento. O objetivo é começar a ganhar uma experiência mais ampla de uso prático e, com base nessa experiência, identificar oportunidades de melhorar a usabilidade e funcionalidade. A segunda tarefa é criar software de próxima geração que tornará a análise de dados visual e conveniente, mesmo para um usuário despreparado.
Duas versões estão planejadas para lançamento amplo: para uso privado e para uso comercial. É possível customizar equipamentos e softwares para qualquer tarefa.
O objetivo global é tornar o georadar algo mais massivo, acessível para uma pessoa interessada em história e arqueologia. Disponível para empresários individuais que trabalham na área de design, construção, especialização, pesquisa de subsolo. A ampla adoção do instrumento formará uma comunidade de usuários. Os planos são criar um banco de dados de medição centralizado. Para que qualquer pessoa, se desejar, possa enviar os dados digitalizados para o servidor, compartilhando-os de forma reembolsável ou gratuita. Além disso, um conjunto maior de dados tornará possível treinar com mais eficácia a rede neural para interpretar os resultados da varredura e a visualização que é compreensível para uma pessoa comum.
Agora está sendo preparada para publicação a segunda parte do artigo com a descrição detalhada da parte técnica. Isso é tudo por hoje, se você estiver interessado - escreva, envie sokolov.labs@gmail.com . Tchau a todos, obrigado pela atenção!