Há pouco mais de um ano, tive a sorte de fazer parte da equipe de cientistas e engenheiros responsáveis pela operação do rover Curiosity. Desde então, aprendi MUITO sobre rovers. Mas ainda há mais a ser visto. Spirit, Opportunity, Curiosity e Perseverance são alguns dos robôs mais sofisticados e confiáveis já criados pelo homem. Ao mesmo tempo, as ferramentas e métodos usados para controlar os rovers são bastante fáceis de aprender e compreensíveis. E isso é bom, porque no dia 18 de fevereiro, o Perservance descerá à superfície de Marte, depois será enviado para estudar o planeta. Agora, minha tarefa é falar sobre como controlar o rover. Quando o novo rover chegar a Marte, você já entenderá o que está acontecendo e como tudo funciona.
Grande parte deste artigo é um resumo de minhas experiências com o Curiosity. Lembre-se de que Spirit e Opportunity são, em muitos aspectos, semelhantes a seu "herdeiro" nesse aspecto. As mesmas tecnologias e métodos serão usados para gerenciar a persistência, portanto, não haverá diferenças significativas.
O básico
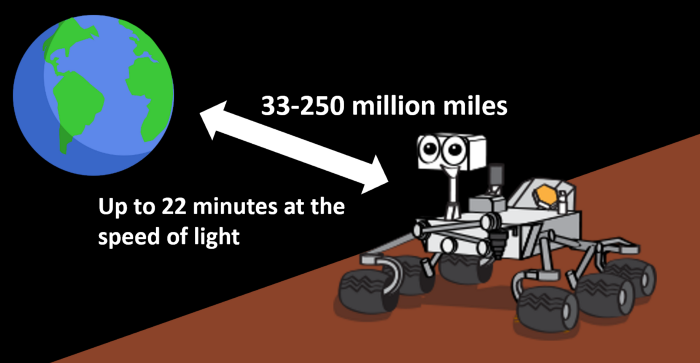
A principal coisa a saber é que Marte está muito, muito longe de nós. Um sinal de rádio enviado da Terra atinge a superfície de Marte em 22 minutos. Portanto, o controle em tempo real não é uma opção. Além disso, o Curiosity recebe informações da Terra uma vez por dia. O resto do tempo ele está sozinho. Ao mesmo tempo, não estamos falando de qualquer autonomia: o rover tem um conjunto limitado de ações que pode realizar de forma independente. A maior parte do que o rover faz é planejada e gravada na memória do dispositivo na Terra.
Claro, há algumas exceções: o rover deve ser capaz de resolver alguns problemas sozinho. Mas a maioria dessas decisões "são parar e esperar por instruções da Terra em resposta a algum fator externo. O Aegis tem um certo grau de autonomia - um sistema que pode selecionar independentemente um pedaço de rocha no qual o Curiosity deve "atirar" com um laser.
Cuidado onde pisa
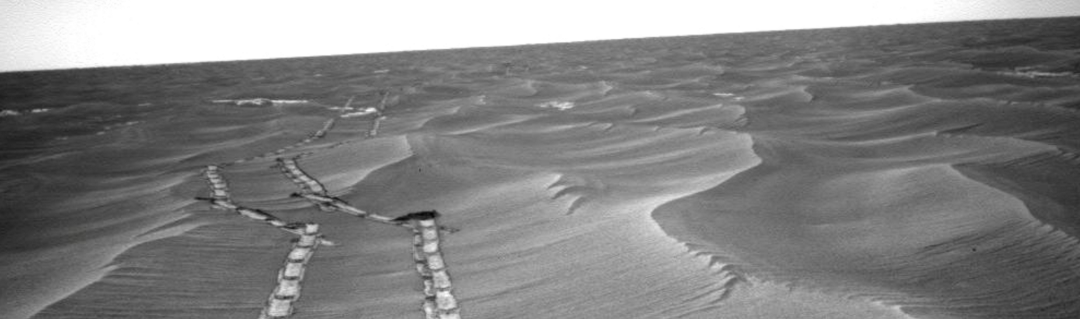
A principal tarefa do operador do rover é garantir sua segurança durante toda a jornada em Marte. Portanto, você deve avaliar cuidadosamente todas as opções possíveis para suas ações. Os rovers da NASA possuem várias câmeras, graças às quais o rover forma uma "imagem", como se vista com olhos humanos. Existem também câmeras de perigo, “câmeras de perigo”, que avaliam problemas nas proximidades, e navcams, que são câmeras de navegação que avaliam a estrada à frente. Existem também outras câmeras que, no entanto, são usadas principalmente para tarefas científicas, portanto, evitarei descrever como elas funcionam.

Na maioria dos casos, as navcams são usadas para avaliar visualmente a seção da trilha do rover. As imagens que recebem podem ser vistas como uma "imagem" tridimensional na Terra. A NASA desenvolveu um software especializado projetado para visualizar a área ao redor do rover e criar um modelo virtual do rover e da área ao seu redor. Este modelo virtual é usado para testar ações planejadas pelo operador. Se a emulação for bem, os comandos podem ser enviados para Marte. Dessa forma, os cientistas se salvam das possíveis consequências negativas do envio de uma equipe não verificada.
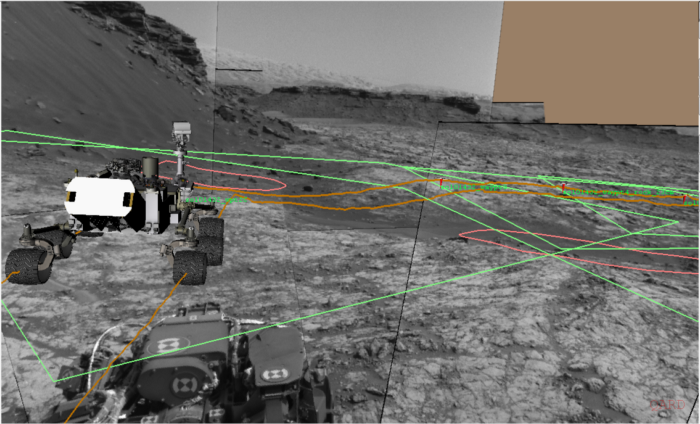
É assim que o movimento do rover simulado se parece depois que o modelo está completamente pronto. As áreas cinzentas são a seção de Marte pela qual o rover passará em um futuro próximo. As linhas laranja-marrons são, na verdade, o caminho do veículo espacial. Cerca de 30 metros da superfície são modelados por dia, as câmeras simplesmente não conseguem coletar mais informações, então o rover viaja muito.
E aqui está a sobreposição da trajetória do rover simulado nas imagens reais obtidas pelas câmeras de navegação.
Ao planejar o movimento do rover, há vários pontos importantes a serem considerados. Por exemplo, o tamanho dos objetos ao longo do caminho. O tamanho máximo que o rover pode suportar é cerca de 50 cm. Qualquer coisa maior deve ser arredondada. Também é aconselhável se curvar em torno da areia (não é bem areia, mas vamos chamá-la assim): se houver muita areia, o rover pode emperrar. Mesmo pequenos pedaços de rocha são perigosos, pois suas pontas afiadas danificarão as rodas do veículo espacial.
Rápido, lento ou lento?
Depois que os cientistas decidirem a direção do movimento, você precisa entender exatamente como se mover. Existem três modos: modo cego, odometria visual e autonav.
O modo cego é o movimento mais fácil possível. Neste caso, o rover seguirá as instruções enviadas da Terra e não prestará atenção em nada. Idealmente, este é um ótimo método de navegar um rover, mas as condições em Marte estão longe do ideal. Freqüentemente, fatores externos influenciam o progresso em direção à meta. Isso pode ser, por exemplo, rodas deslizantes na superfície, de modo que o rover, em vez de se mover 10 metros, se mova 9 ou até 5.
Uma ótima maneira de entender o que é direção cega é fechar os olhos e tentar seguir um determinado caminho. Por exemplo, 7 metros para a frente, depois vire 30 graus para a esquerda e caminhe mais 4 metros. Nesse caso, não temos ideia do que está acontecendo ao redor e não nos adaptamos às mudanças nas condições.
Em geral, a direção cega não é a melhor opção, mas permite que o rover se mova rapidamente, já que o sistema não precisa parar para tirar fotos. Em velocidade máxima, o rover pode percorrer toda a extensão de um campo de futebol em apenas uma hora. Mas essa opção é escolhida apenas se não houver objetos potencialmente perigosos por perto.
Odometria visualusado pelos operadores com mais frequência. Nesse caso, o rover para a cada metro para tirar uma foto do solo com câmeras. O computador de bordo avalia a imagem, compara-a com a anterior e tenta entender o que mudou ao seu redor, incluindo a localização do rover. O computador então envia novos comandos de navegação para mantê-lo no caminho certo.
Este método é semelhante ao anterior, apenas no processo de avançar a cada dois passos que você precisa parar para abrir os olhos e olhar ao redor.
A odometria visual é um equilíbrio entre a velocidade e a precisão do movimento. O método é extremamente importante, pois ajuda a detectar obstáculos no caminho do rover e evitá-los.
Navegação automática, ou autonav, é o método mais avançado tecnologicamente. Pode ser comparado a usar um drone em um carro. Definimos um objetivo comum e o próprio rover procura um caminho seguro e rápido para o objetivo. O rover precisa parar a cada metro para avaliar a situação por meio de câmeras. Mas em vez de tirar uma foto com câmeras de navegação, o rover também usa câmeras de perigo. Em seguida, o computador de bordo reúne todas essas informações, formando um "mapa de perigo". Os locais problemáticos estão marcados em vermelho, os locais onde a situação não é tão grave estão em amarelo e a área mais adequada para promover o roteador está marcada em verde.

Esta é a opção de progressão mais lenta para um rover. Se, em uma situação ideal, o rover pode percorrer o comprimento de um campo de futebol usando o método cego, conforme mencionado acima (isso é cerca de 100 m), então, no caso do modo autônomo, em condições ideais, o rover percorrerá apenas 30 metros.
Ao mesmo tempo, o rover não é capaz de detectar areia ou pedras pontiagudas, então o método é usado apenas quando o terreno é absolutamente seguro.
O que você pode esperar do Perseverance?
A NASA espera que o novo rover pouse na superfície do planeta já em 18 de fevereiro. Depois disso, espero que ele comece a se mover em Marte. Tudo que eu disse acima se aplica ao novo rover, mas ele tem mais recursos. Por exemplo, ele será capaz de se mover pelo menos duas vezes mais rápido que o Curiosity: o PC de bordo tem mais recursos de computação e algoritmos de processamento de dados aprimorados. As câmeras de navegação do robô são coloridas, recebem imagens com resolução superior à do Curiosity. Além disso, o rover tem rodas mais grossas do que seu antecessor e um padrão de piso diferente. Os cientistas acreditam que as rodas serão menos danificadas.
Uma das tarefas mais importantes para o rover: coletar e armazenar amostras para retornar à Terra. Muito depende do sucesso desta missão. E agora, quando o rover começar a se mover, você entenderá o que e como esse movimento é fornecido.
Nota: Evan Hilgemann é engenheiro mecânico do Jet Propulsion Laboratory (JPL) da NASA.
