
“Basicamente, nosso trabalho é sobre como projetar comportamento de comutação espontânea usando dinâmica caótica”, diz o co-autor Kohei Nakajima, um matemático aplicado da Universidade de Tóquio, no Japão. Normalmente, os engenheiros projetam um robô que anda e corre, e o experimentador pode então usar um controlador portátil externo para mudar esses "comportamentos". Mas, para saltar de um ambiente controlado para um em que o robô pode mudar de comportamento de forma autônoma, os pesquisadores procuraram simular um movimento caótico. Freqüentemente visto no cérebro de animais e outros sistemas dinâmicos, o roteamento caótico ocorre quando um sistema muda de forma imprevisível, mas determinista, entre vários padrões estereotipados, seja andando, correndo ou qualquer outra forma de comportamento.

Experiências passadas
A robótica procurou imitar o movimento caótico no passado, de acordo com o principal autor Katsuma Inoue, um estudante de graduação da Universidade de Tóquio. Um robô, criado em 2006, modelou um bebê humano com um sistema somatossensorial e centenas de motores representando os músculos do corpo, cada um conectado a vários osciladores caóticos - o equivalente bruto dos neurônios motores. Os sistemas somatossensoriais interagem com osciladores caóticos, que então sinalizam movimento para os "músculos". Projetado para imitar o desenvolvimento inicial das habilidades motoras humanas, o sistema reproduzia movimentos caóticos, alternando vários comportamentos estereotipados, incluindo engatinhar e rolar.
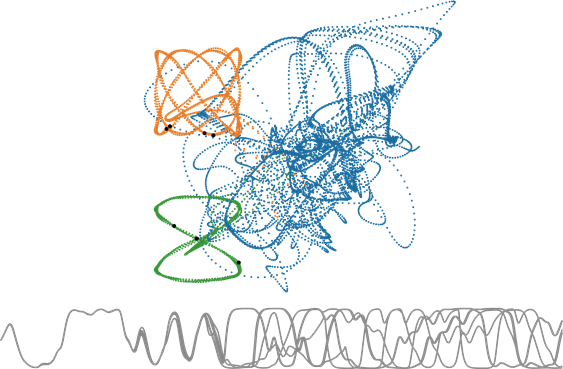
As formas em azul, laranja e verde nesta imagem representam vários comportamentos que os autores projetaram para que seu cérebro de robô alternasse de forma autônoma. Para fazer isso, os pesquisadores criaram características de um fenômeno chamado movimento caótico. Imagem da palestra "Projetando mudanças comportamentais espontâneas por meio de itinerância caótica" (Katsuma Inoue, Kohei Nakajima e Yasuo Kuniyoshi).
Outra pesquisa se concentrou no desenvolvimento de comportamento de comutação espontânea em robôs usando uma estrutura hierárquica com uma rede neural de nível superior conduzindo módulos de nível inferior que correspondem a cada tipo de comportamento. Porém, de acordo com Kohei Nakajima, o processo de aprendizado leva muito tempo nesses experimentos.
Como o sistema é único?
Para superar esses problemas, os pesquisadores japoneses não usaram o design hierárquico. Em vez disso, em um método de três etapas usando uma estrutura de aprendizado de máquina, os pesquisadores primeiro identificaram vários comportamentos possíveis e treinaram a rede neural para reproduzi-los de acordo com comandos. Os pesquisadores então treinaram a rede para alternar entre esses comportamentos em uma ordem específica e, finalmente, desenvolveram transições probabilísticas entre esses comportamentos usando uma dinâmica caótica. O resultado foi um sistema com características de movimento caótico.

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
O que vai acontecer à seguir?
A ideia central da pesquisa é criar uma forma mais simples e elegante de realizar a locomoção espontânea, semelhante à dos animais. No entanto, a implementação deste estudo até agora tem sido limitada a uma rede neural em um computador. Os pesquisadores agora planejam mudar de computadores para robôs físicos na esperança de finalmente criar máquinas que se comportem de forma autônoma e espontânea.
Uma característica distintiva do cérebro humano, a plasticidade da mente permite que as pessoas adquiram novos conhecimentos sem destruir velhas memórias. Os cientistas veem essa pesquisa como um passo para a criação de um cérebro sintético que pode ter uma memória que pode interagir com o meio ambiente por meio de um corpo artificial.
Lista de referências:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf