
A pele não é apenas o maior órgão de nosso corpo, mas também o maior sistema sensorial, a cada segundo coletando informações sobre estímulos externos e os níveis de seu impacto em nosso corpo. Do ponto de vista mecânico, a reconstrução da pele humana não é tão difícil, mas será apenas uma camada protetora artificial, desprovida de atividade neural. Cientistas da Royal University of Technology de Melbourne (Melbourne, Austrália) desenvolveram um sistema de sensores artificiais que imita vários sensores de pele humana. O que foi necessário para criar uma imitação tão complexa, qual é o princípio de operação do dispositivo, quais estímulos ele pode perceber e onde esse desenvolvimento pode ser aplicado? Encontraremos respostas para essas e outras questões no relatório dos cientistas. Ir.
Base de pesquisa
O sistema sensorial da pele humana pode ser dividido em vários subsistemas, cada um deles responsável por determinados estímulos. Os receptores mais comuns e importantes são considerados receptores de pressão (corpúsculos de Pacini), temperatura (termorreceptores) e receptores de dor (nociceptores).
Cada um desses receptores coleta informações e transmite sinais ao cérebro humano para processamento e tomada de decisões apropriadas. Outros sistemas sensoriais (visão, audição, paladar, olfato) têm um princípio de operação semelhante.
É lógico que tal sistema biológico seja extremamente difícil de reproduzir, mesmo levando em consideração os sensores táteis modernos e CMOS (estrutura complementar semicondutora de óxido metálico).
Existem desenvolvimentos que implementam um nociceptor artificial baseado em um memristor de difusão *, que pode exibir um estado normal que consiste em um estágio de tensão e relaxamento do nociceptor, bem como um estado anormal com alodínia * e hiperalgesia * do nociceptor usando estímulos externos como tensão.
Memristor * é um elemento passivo em microeletrônica capaz de mudar sua resistência dependendo da carga que passa por ele.
Alodinia * é uma dor anormal causada por um irritante que geralmente não é doloroso (como dor quando tocado levemente).Segundo os cientistas, esses desenvolvimentos são extremamente importantes, uma vez que o mecanismo de chaveamento do memristor depende dos filamentos condutores, que têm diâmetro aproximadamente subnanômetro. Usando o módulo termoelétrico e o módulo de pressão piezoelétrico, é possível atingir com sucesso um estado de tensão e relaxamento entre as quatro funções principais do nociceptor.
Hiperalgesia * - uma sensibilidade anormalmente alta do corpo a estímulos de dor.
No momento, uma técnica semelhante é usada para criar um olho artificial, mas sua implementação no formato de pele artificial ainda não foi alcançada.
Neste trabalho, os cientistas demonstram um protótipo funcional de receptores eletrônicos artificiais que imitam o pequeno corpo de Pacini, termorreceptor e nociceptor. Isso foi alcançado por meio de uma combinação de vários componentes funcionais:
- memristor para tomada de decisão baseado em titanato de estrôncio SrTiO3 (STO) com deficiência de oxigênio;
- Sensor de pressão elastômero de tração com base em ouro (polidimetilsiloxano, ou seja, PDMS);
- gatilho de temperatura baseado em óxido de vanádio (VO 2 ) com mudança de fase.
A principal diferença desse conceito em relação aos anteriores é que não há necessidade de módulos termelétricos complexos e separados e sensores de pressão piezoelétricos para a implementação prática de somatossensores. Consequentemente, o desenvolvimento usa filmes finos de óxido extremamente baratos e prontamente disponíveis, bem como sensores de pressão vestíveis em PDMS biocompatíveis.
Resultados da pesquisa
Antes de criar qualquer coisa, você precisa pensar no que e como funcionará na versão final. Com o objetivo de criar receptores cutâneos artificiais, foi desenvolvida uma base hipotética para a implementação de corpos de Pacini funcionais, termorreceptores e nociceptores (diagrama abaixo).

Imagem # 1
Os somatossensores humanos são conectados à medula espinhal através dos chifres espinhais (protuberâncias de massa cinzenta), que transmitem informações ao cérebro ( 1a ). Existem maneiras especiais de determinar a pressão (azul em 1a ) e a temperatura (vermelho em 1a ).
Os corpos de Pacini são camadas de membranas cheias de fluido. As impressões digitais são um excelente exemplo do corpinho de Pacini. Quando a pressão local é aplicada ao corpo, parte do corpo é deformada, causando uma mudança nos íons químicos (por exemplo, sódio ou potássio) e, como resultado, um potencial receptor surge nas terminações nervosas da pele. Este potencial receptor, quando energia suficiente (limiar) é atingida, gera um impulso elétrico dentro do corpúsculo que viaja através do sistema nervoso central para ativar uma resposta motora via fibras nervosas (azul em 1a ).
Quando a temperatura da pele sobe acima de 30 ° C, o termorreceptor detecta o calor e dispara os potenciais de ação. A frequência de excitação aumenta com o aumento da temperatura do estímulo até atingir o valor de saturação. Além disso, os nociceptores de calor que captam os sinais de dor começam a disparar por volta dos 45 ° C. Essas células são especializadas na detecção de calor e queimaduras prejudiciais.
Quando um estímulo prejudicial é recebido por um neurônio térmico localizado em uma terminação nervosa livre, uma resposta elétrica é enviada ao nociceptor para comparar se a amplitude do estímulo cruza o limiar para gerar um potencial de ação e enviá-lo ao sistema nervoso central através da medula espinhal (vermelho em 1a ).
Para criar receptores artificiais semelhantes, foram usados transdutores de pressão baseados em ouro e PDMS que alternam entre os estados de baixa resistência (LRS) e alta resistência (HRS) com e sem pressão aplicada para simular um corpúsculo de Pacini ( 1b e 1c ).
Para mimetizar o comportamento de termorreceptores e nociceptores, foi utilizada uma transição de fase do VO 2 , que pode passar de HRS em temperatura ambiente para LRS em temperaturas acima da temperatura de transição (68 ° C).
Além disso, a memória de comutação resistiva baseada em STO (titanato de estrôncio) foi usada como um elemento de tomada de decisão para avaliar os níveis de limiar.
Para um corpo de Pacini artificial, quando não há pressão detectável, a corrente através do memristor de decisão (I 1 ) é insuficiente devido à tensão de polarização para iniciar a resposta motora ( 1b ). Quando a pressão é aplicada, o transmissor entra no modo HRS, bloqueando I 2 , permitindo que a corrente máxima flua através do memristor. Devido ao I 1 mais alto , o memristor baseado em STO muda para o LRS. Consequentemente, uma corrente mais elevada flui pelo corpo, causando uma reação motora ( 1c ).
No caso do termorreceptor e nociceptor VO 2pode mostrar uma mudança na resistência de três a quatro ordens de magnitude na temperatura da junção. Se a temperatura estiver abaixo da temperatura da junção, o VO 2 é um isolante.
Assim, uma pequena quantidade de corrente flui pelo receptor, e a voltagem que aparece no memristor não é suficiente para ligá-lo ( 1d ). Quando a temperatura da junção é atingida, o VO 2 muda para LRS e, como resultado, um potencial maior aparece no memristor, fazendo com que ele mude para LRS. Quando o VO 2 e o STO estão no LRS, um aumento da corrente flui pelo receptor ( 1e ).
Corpo artificial de pacini
Depois de criar o conceito do futuro dispositivo, os cientistas começaram uma implementação em fases. A primeira etapa foi a criação de um corpo artificial de Pacini, para o qual foi utilizado um memristor baseado em STO deficiente em oxigênio com estrutura em pilha: Pt (100 nm) / Ti (10 nm) / STO (55 nm) / Pt (25 nm) / Ti (7 nm) e um substrato de SiO 2 .
A camada inferior de Ti é usada como camada adesiva da camada inferior de Pt, e a camada superior de Ti é usada como reservatório de oxigênio e também como camada adesiva da camada superior de Pt. A camada inferior de Pt participa do processo de troca, enquanto a superior atua como um material inerte que evita que o TiO 2 seja exposto ao oxigênio ambiente.
A arquitetura do transdutor de pressão é inspirada no corpúsculo biológico de Pacini, que tem forma helicoidal com largura de faixa de 100 mícrons. O diâmetro total da bobina é de 7,8 mm. Para criar um sensor, Au (200 nm) / Cr (20 nm) foi depositado em um PDMS com espessura de 300 μm.
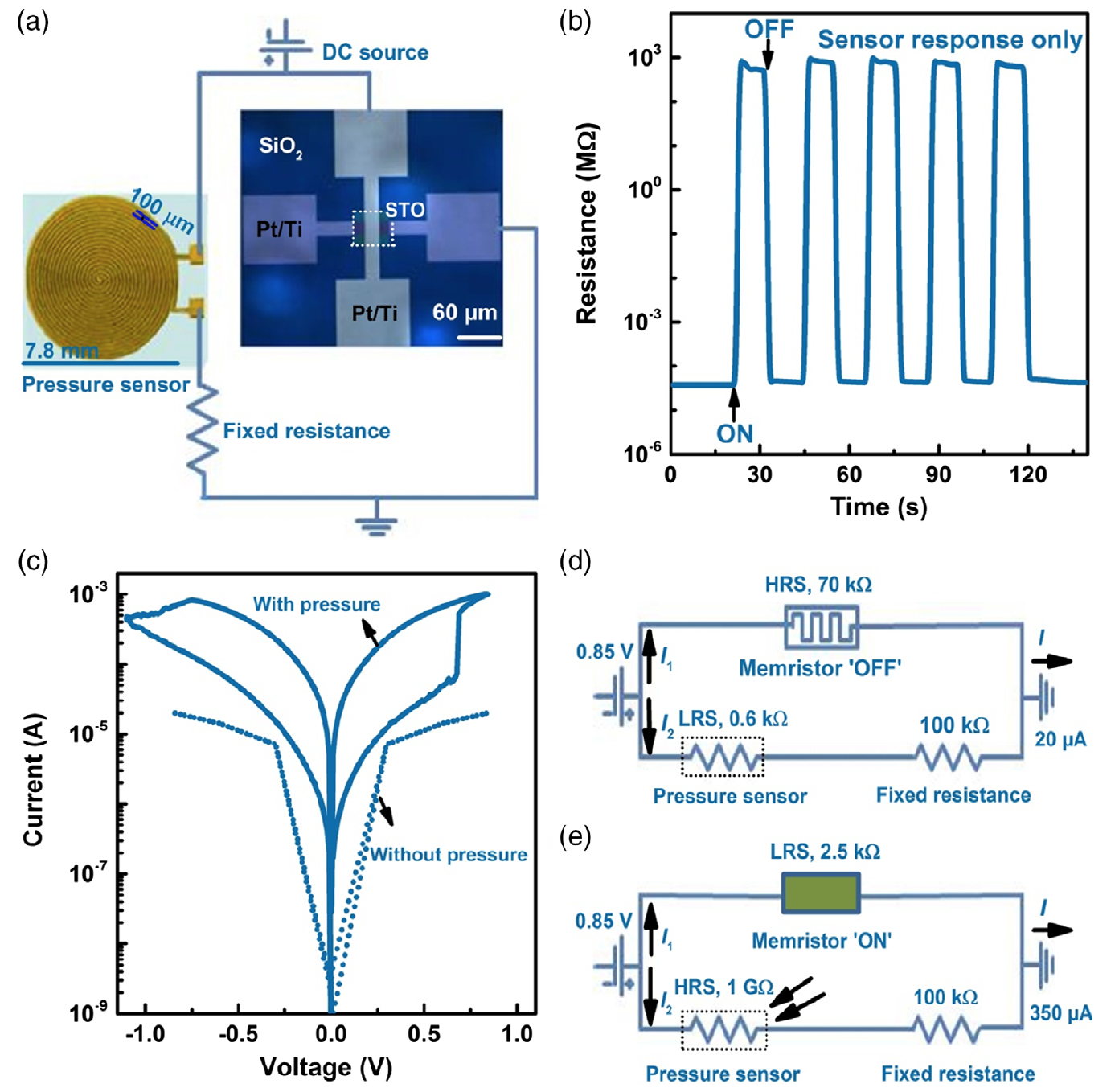
Imagem # 2 A
imagem 2a mostra um equivalente artificial de um pequeno corpo com a integração de um memristor e um sensor de pressão.
A rede de sensores de pressão funciona de forma a permitir que o receptor ative o memristor, que atua como um componente de tomada de decisão.
Em sistemas biológicos, quando o potencial receptor suficiente é alcançado, o componente de tomada de decisão pode criar um impulso elétrico para ativar o motor do sistema nervoso central. Para replicar essa função com um valor de limite específico, o sensor de pressão deve detectar uma faixa específica de valores de pressão. Para simplificar a demonstração da eficiência do sistema, os cientistas decidiram simplificar esse ponto para apenas dois valores: há forte pressão e não há pressão alguma.
Uma resistência fixa de 100 kΩ foi escolhida para limitar a corrente através da rede de sensores de pressão, que possui uma resistência de apenas 0,6 kΩ. Isso garante que o sistema exiba uma corrente muito baixa na ausência de pressão. Figura 2bmostra a resposta e a repetibilidade de um transdutor de pressão autônomo.
Quando a pressão é aplicada, o transdutor de pressão entra em muito HRS com uma resistência de cerca de 1 GΩ devido à deformação e rachaduras, que são muito comuns com transdutores baseados em PDMS. Devido a deformações e trincas, o desempenho do transdutor de pressão pode se deteriorar após ciclos repetidos, mas isso não impede a demonstração do próprio conceito de transdutor artificial. Quando a pressão é liberada, os espaços rachados se fecham novamente, criando um LRS, fazendo com que o sensor volte ao seu estado original.
Um padrão semelhante é observado em sensores biológicos, que também se deformam, o que leva a uma mudança de íons químicos quando a pressão é aplicada.
Deve-se notar que o componente de decisão que consiste no elemento de memristor STO deve ser eletroformado inicialmente pela aplicação de uma tensão de polarização em uma corrente muito baixa de 1 μA aos eletrodos superior e inferior. Este estágio cria um canal localizado para a formação de filamentos condutores através do STO. Uma varredura de tensão é então necessária para alternar o dispositivo entre os estados HRS e LRS.
Também é importante que, sem a pressão aplicada, a corrente que flui pelo memristor seja insuficiente para trocá-lo. No entanto, quando a pressão é aplicada, o sensor que contém o ramo entra no estado HRS, o que leva ao potencial máximo do receptor no memristor ( 1s) Quando o limite do potencial do receptor é alcançado, o memristor de tomada de decisão muda do estado HRS para o estado LRS ( 2s ). Neste estado, a sequência aplicada 0 → +0,85 V → 0 → 1,12 V → 0 muda o dispositivo para o estado LRS para o ciclo positivo e para o estado HRS para o semiciclo negativo ( 2d e 2e ).
Para converter um dispositivo em LRS, apenas o meio ciclo positivo é levado em consideração. De acordo com a imagem 2d , quando nenhuma pressão é aplicada, o circuito sensor de pressão tem uma resistência total de 100,6 kΩ, enquanto o componente de decisão paralelo (memristor) tem uma resistência de 70 kΩ. Assim, a resistência equivalente de todo o corpo do Pacini é 41,2 kΩ.
Essa resistência equivalente transporta apenas 0,02 mA de corrente por todo o circuito, o que pode ser considerado um estado relaxado. A aplicação de pressão converte o circuito do sensor de pressão em uma resistência extremamente alta de 1 GΩ, enquanto a resistência do memristor é de apenas 2,5 kΩ, alterando a resistência equivalente de todo o corpo do Pacini em cerca de 2,5 kΩ. Esta condição de baixa impedância permite uma corrente ≥ 0,35 mA em todo o circuito.
Assim, o estímulo de pressão gera um sinal de resposta quase 18 vezes maior do que no estado relaxado, o que pode permitir que o sistema nervoso central inicie sua resposta motora. Após a resposta motora estar completa, a polaridade reversa pode ser aplicada ao memristor usando eletrodos não usados para inicializar o corpúsculo de Pacini.
Termorreceptor artificial
Para criar um termorreceptor na base do memristor, a mesma estrutura de pilha foi usada para o corpinho Pacini, ou seja, metal-isolante-metal (MIM).
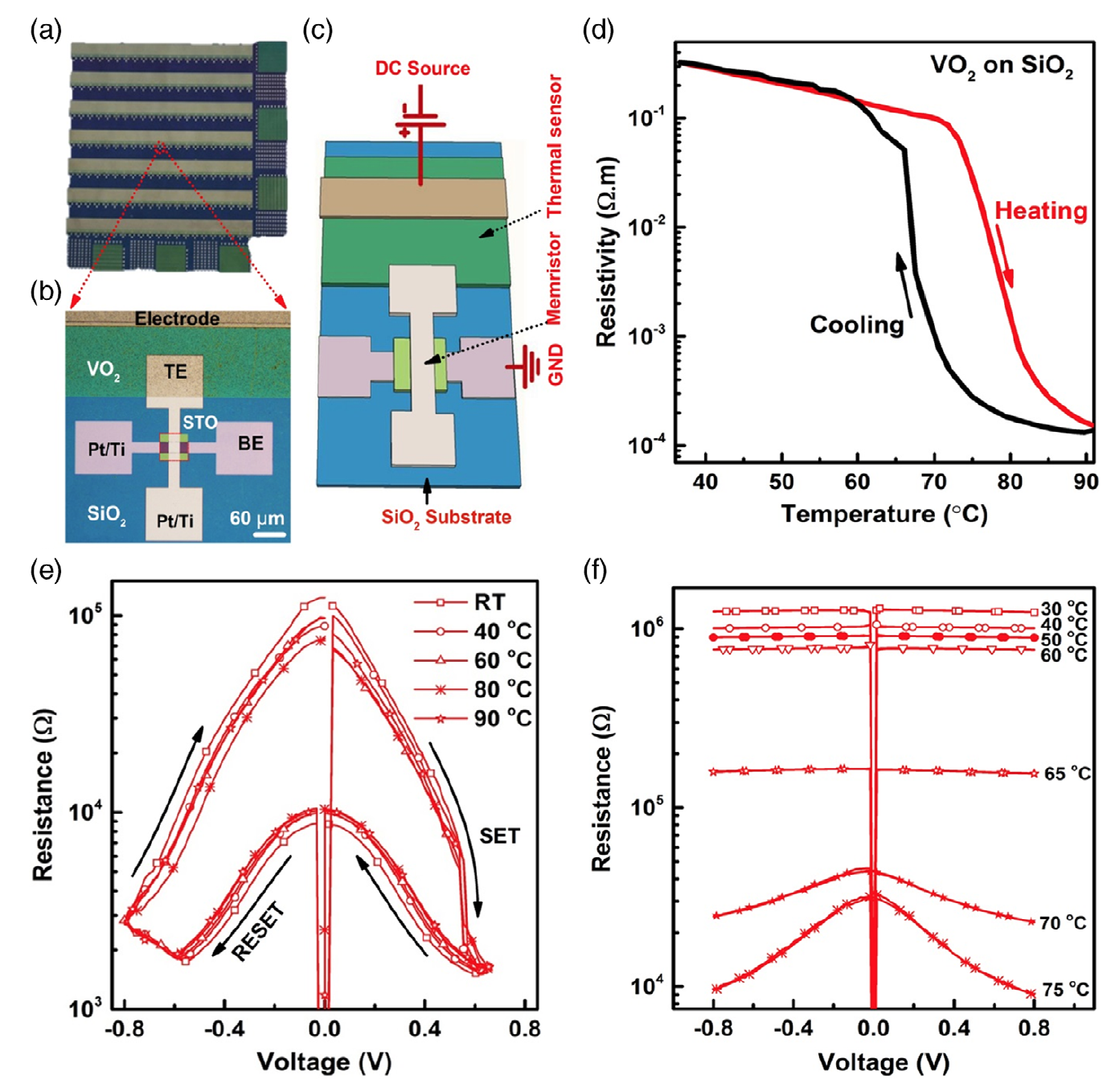
Imagem №3
Parte superior de electrões utilizados em conjunção com a superfície do VO 2 ( 3 a e 3b ) para ligar sequencialmente um sensor térmico. Para deslocar todo o dispositivo, esta camada de eletrodo de Pt (100 nm) / Ti (10 nm) foi depositada na superfície do VO 2 . Uma distância substancial de 100 μm foi mantida entre o eletrodo inicial e o eletrodo de memristor superior.
Na imagem 3cmostra um diagrama de conexão do termorreceptor, no qual a polarização é aplicada através do metal ao sensor térmico, e o terra (GND no diagrama) é conectado ao eletrodo inferior do memristor que toma a decisão.
O gráfico 3d mostra a curva de resistência versus temperatura para a transição dielétrico-metal em um filme fino de VO 2 . Obviamente, quando a temperatura de transição é atingida, a resistividade cai quatro ordens de magnitude. Histerese térmica óbvia também é observada em ciclos de aquecimento e resfriamento. Também foi verificado que não havia efeito perceptível da temperatura na comutação resistiva ( 3e ).
O memristor pode indicar a mudança na resistência de 100 kOhm a 2 kOhm durante o processo de comutação. No entanto, para uma análise mais clara, foi decidido considerar a resistência do estado HRS como 93 kΩ, e a resistência do estado LRS como 9 kΩ na tensão de leitura de 80 mV (V READ ), uma vez que nesta tensão a relação de comutação máxima R OFF / R ON é observada . A sequência de comutação de voltagem do dispositivo off-line finalizado foi: 0 → +0,65 V → 0 → 0,80 V → 0. Quando a mesma sequência é aplicada a todo o termorreceptor, a resistência diminui e, portanto, a corrente do receptor aumenta com o aumento da temperatura ( 3f ).
Para fornecer a tensão de comutação necessária, a temperatura do receptor foi mantida a 70 ° C. Isso é para garantir que o VO 2 esteja no estado LRS. Em seguida, a aplicação de uma tensão de polarização de 0 a 2 V configura e reinicializa completamente o dispositivo ( 4a ).
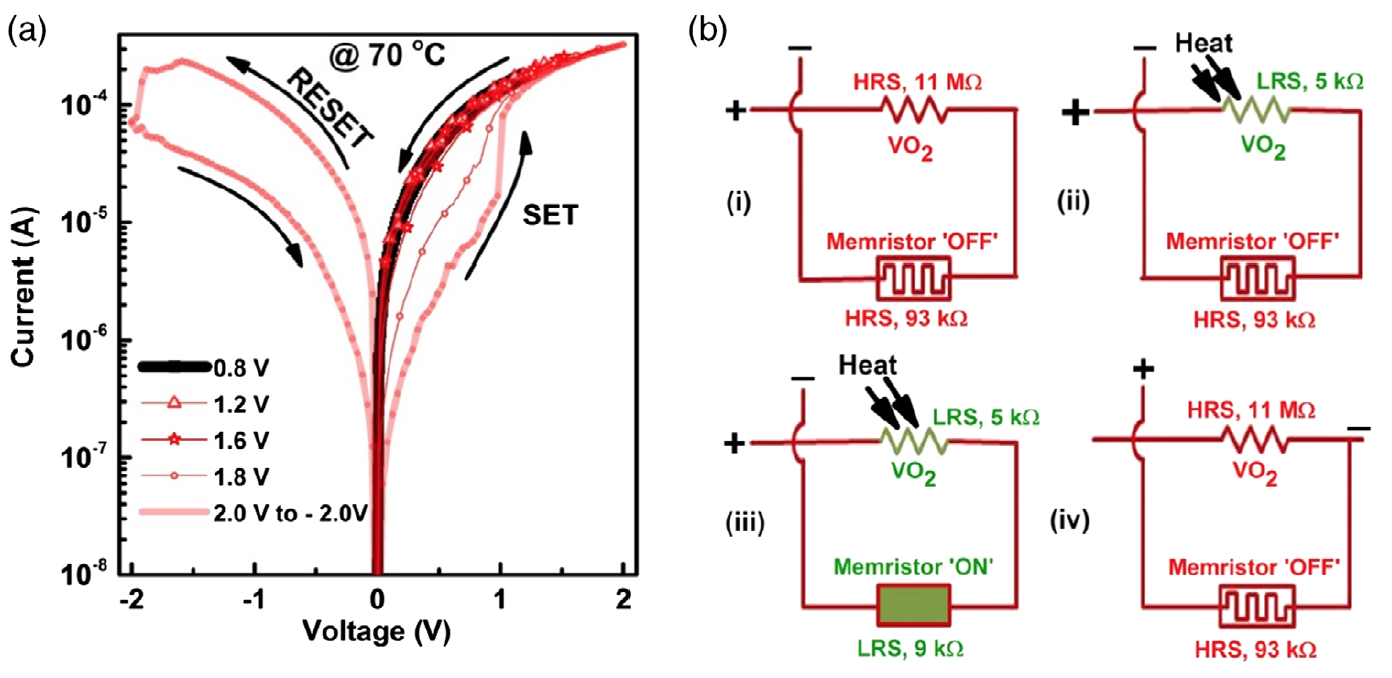
Imagem nº 4
Para um memristor tomando uma decisão, a resistência inicial de 93 kΩ é muito menor do que o HRS do sensor térmico, que é 11 MΩ. Assim, a tensão parcial que aparece no memristor de decisão não pode atingir o limite VSET para convertê-lo de HRS para LRS. Portanto, tanto o sensor térmico quanto o memristor estão no estado HRS, o que permite que uma corrente mínima flua através do termorreceptor [ 4b (i) ].
Quando uma temperatura crítica de 70 ° C é aplicada, a resistência do sensor de temperatura diminui em quatro ordens de magnitude e a voltagem parcial do memristor aumenta gradualmente para a voltagem SET com o aumento da resposta do receptor [ 4b (ii) ]. Assim que o VSET liga o memristor, ele entra no LRS a partir do HRS com uma resistência de 9 kΩ [ 4b (iii) ].
Nesse estágio, a resposta máxima do receptor é formada. A memória LRS persistirá por um longo tempo, mesmo se o estímulo térmico for completamente desativado. Para reprogramar o memristor, o VRESET de tensão negativa pode transferi-lo de LRS para HRS [ 4b (iv) ]. Para isso, tensão negativa pode ser aplicada a partir de eletrodos não utilizados ( 3c ).
Nociceptor artificial
É seguro dizer que os nociceptores são significativamente diferentes de seus homólogos. Os nociceptores são encontrados em todo o corpo humano e estão localizados no final do axônio do neurônio sensorial.
Para evitar a exposição a estímulos nocivos, o nociceptor responde de duas maneiras: normal e anormal.
Em condições normais, quando um nervo que termina na pele recebe um estímulo prejudicial, um sinal de resposta é enviado ao nociceptor para comparar se o sinal excede um determinado valor de limiar e para decidir se um potencial de ação precisa ser gerado para o sistema nervoso central. Nesse estado normal, o nociceptor é lentamente desligado por um período conhecido como processo de relaxamento. Ao utilizar este processo de limiar e relaxamento, o nociceptor isola o corpo de qualquer estímulo crítico e contínuo indesejado.
Uma resposta anormal ocorre quando o corpo se depara com estímulos próximos ao limiar para danos ao nociceptor e, nesse estado, o nociceptor atua como um receptor normal para evitar danos maiores. Se a lesão ainda foi recebida, a vulnerabilidade do tecido afetado aumenta. O sistema nociceptivo adapta-se a esta vulnerabilidade aumentada, reduzindo localmente o limiar nociceptivo e facilitando a resposta nociceptiva, proporcionando assim uma proteção adequada do tecido.
O nociceptor exibe dois comportamentos distintos em condições anormais: alodinia e hiperalgesia.
A alodínia responde em um limiar mais baixo, enquanto a hiperalgesia produz uma resposta mais forte quando o limiar é excedido, indicando que não há limiar para nociceptor na condição anormal.
Para observar o comportamento do termorreceptor artificial em condições normais, que atua como nociceptor durante estímulos nocivos, o aparelho foi trocado para LRS e a leitura foi lida em V READ de 80 mV.
Como a resposta do nociceptor biológico é altamente dependente da intensidade do estímulo, o nociceptor artificial foi exposto a uma série de estímulos de temperatura com diferentes intensidades na faixa de 66 a 82 ° C ( 5a ).

Imagem # 5 O
gráfico 5b mostra o sinal de resposta em relação à intensidade do estímulo térmico aplicado. Deve-se observar que o nociceptor não liga até que o pulso de temperatura alcance 68 ° C, que é a temperatura de transição do VO utilizado2 . Assim, quando o VO 2 perde o LRS devido à transição induzida pela temperatura, uma alta corrente começa a fluir pelo circuito. Tal comando se assemelha a sistemas biológicos nos quais o nociceptor gera um potencial de ação que dispara o cérebro quando a força do estímulo atinge valores acima do crítico.
Um aumento adicional na intensidade do estímulo acima do valor limite leva a uma corrente maior, que também é consistente com a resposta do análogo biológico: quanto maior a intensidade do estímulo, maior a intensidade da resposta. O gráfico 5c mostra os estímulos de aquecimento e resfriamento e a resposta correspondente a 68 ° C.
Gráfico 5dmostra a atenuação do sinal de resposta ao longo do tempo após o estímulo prejudicial ter sido desligado, ou seja, um processo de relaxamento que é determinado pelo VO 2 , uma vez que não há efeito da temperatura no memristor baseado em STO.
Devido à tendência da resistência do VO 2 aumentar com a queda da temperatura ao longo do tempo, o nociceptor artificial limita a corrente através do circuito e, portanto, ocorre uma diminuição na intensidade dos sinais de resposta.
Uma resposta mais forte devido a estímulos mais elevados requer um tempo relativamente mais longo para o relaxamento completo. Por exemplo, a resposta a 68 ° C leva 100 s para atingir uma corrente de base de 0,5 μA, enquanto a resposta a 80 ° C não pode relaxar totalmente em 100 s.
Para observar o comportamento do dispositivo em condições anormais, um estímulo foi aplicado ao nociceptor artificial, cuja intensidade era muito maior do que em condições normais.
O nociceptor foi aquecido a 90 ° C a uma taxa de 20 graus por minuto e resfriado a 60 ° C, que está abaixo do valor limite (68 ° C) em condições normais.
Seguiu-se o reaquecimento de 60 a 90 ° C, necessário para determinar a presença / ausência de geração de limiar rebaixado e resposta aumentada, que são as principais propriedades da alodínia e da hiperalgesia.
A sequência 60 → 90 → 60 → 90 foi aplicada à porção VO 2 do receptor e a todo o receptor contendo VO 2 e uma pilha metal-isolante-metal ( 6a ).
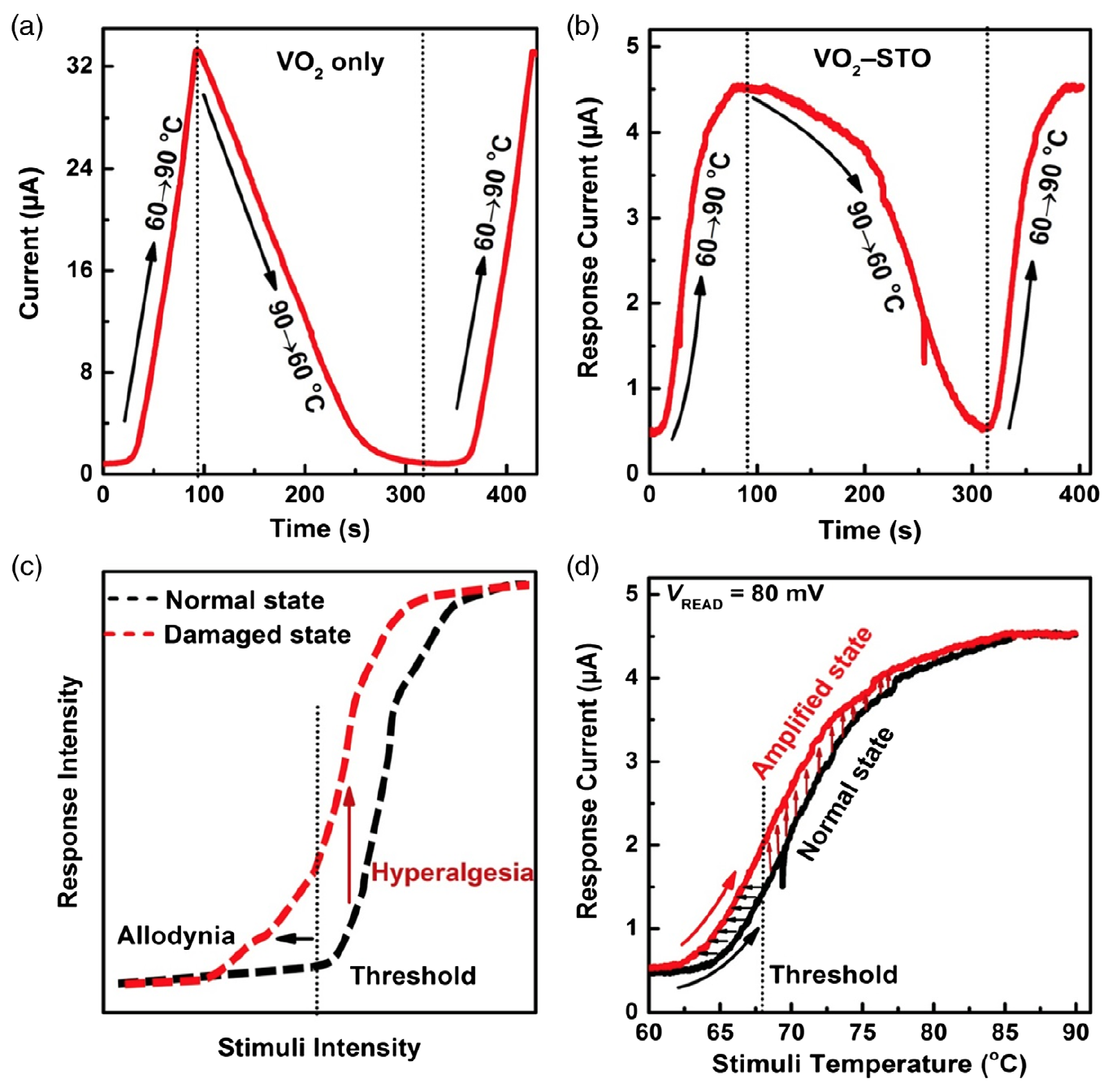
Imagem No. 6
Os gráficos mostram claramente que o sinal de resposta é muito mais linear no VO 2 ( 6a ) em relação ao sinal de todo o nociceptor ( 6b ). Isso é esperado, uma vez que em alta intensidade de estímulo, o VO 2 está em um estado quase metálico com uma resistência relativamente baixa de 5 kOhm após a transição. Além disso, a tensão de polarização aplicada VREAD (80 mV) ajusta eletricamente o VO 2 para torná-lo ainda mais metálico, resultando em uma resposta linear.
Ao mesmo tempo, quando uma polarização V READ semelhante aparece em todo o nociceptor, a queda de tensão máxima ocorre em todo o memristor, que está no estado LRS (9 kΩ). Nesta fase, a tensão em VO2 não é suficiente para mostrar uma resposta linear. Portanto, esse comportamento não é linear.
A Figura 6c mostra o comportamento na alodinia e hiperalgesia. Em um sistema biológico, a intensidade da resposta é maior em um estado anormal para intensidade de estímulo subliminar (alodínia) e supraliminar (hiperalgesia).
Em 6d mostra uma resposta em relação a dois ciclos de sequências de aquecimento com a sequência de 60 → 90 → 60 → 90 ° C. Aqui você pode ver que a resposta para o segundo ciclo de aquecimento é aumentada e o limite é reduzido.
O comportamento do receptor artificial mostra claramente alodínia abaixo da intensidade limite e hiperalgesia acima da intensidade limite (70 ° C). Segue-se disso que, ao diminuir o limiar e aumentar a intensidade da resposta, o nociceptor ativa e aumenta as reações de defesa, como a retirada ou evitação de estímulos dolorosos agudos.
Demonstração do princípio de funcionamento do equivalente eletrônico do corpinho de Pacini.
Para um conhecimento mais detalhado das nuances do estudo, recomendo que você leia o relatório dos cientistas e materiais adicionais a ele.
Epílogo
O cérebro humano é um dos sistemas biológicos mais complexos. Mas não se pode negar o fato de que a pele humana não é menos complexa, especialmente dada a considerável lista de funções que desempenha.
Não é difícil recriar algumas das funções da pele em um equivalente artificial, mas no que diz respeito aos receptores que coletam informações sobre o ambiente, não funcionará, por assim dizer.
No entanto, os cientistas ainda conseguiram alguns resultados na criação de receptores artificiais que captam pressão, temperatura e dor.
Segundo os autores deste trabalho, seu dispositivo é capaz de distinguir entre um leve toque e, por exemplo, uma picada de agulha. À primeira vista, essas são coisas muito comuns, mas antes essa precisão não estava em receptores eletrônicos.
No futuro, os cientistas, naturalmente, pretendem continuar seu trabalho a fim de expandir a gama de estímulos externos percebidos, o que tornará seu dispositivo ainda mais preciso. Tais desenvolvimentos certamente encontrarão sua aplicação não apenas em próteses, mas também na robótica.
Obrigado pela atenção, fiquem curiosos e tenham um ótimo final de semana galera! :)
Um pouco de publicidade
Obrigado por ficar com a gente. Você gosta de nossos artigos? Quer ver um conteúdo mais interessante? Ajude-nos fazendo um pedido ou recomendando a amigos VPS em nuvem para desenvolvedores a partir de US $ 4,99 , um análogo exclusivo de servidores básicos que inventamos para você: The Whole Truth About VPS (KVM) E5-2697 v3 (6 núcleos) 10 GB DDR4 480 GB SSD 1 Gbps de $ 19 ou como dividir o servidor corretamente? (opções disponíveis com RAID1 e RAID10, até 24 núcleos e até 40 GB DDR4).
O Dell R730xd 2x é mais barato no data center Equinix Tier IV em Amsterdã? Apenas temos 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV a partir de US $ 199 na Holanda!Dell R420 - 2x E5-2430 2.2 Ghz 6C 128 GB DDR3 2x960 GB SSD 1 Gbps 100 TB - a partir de $ 99! Leia sobre como construir a infraestrutura do prédio. classe com servidores Dell R730xd E5-2650 v4 a um custo de 9.000 euros por um centavo?