
A evolução nos deu muitos animais incomuns. Alguns deles são tão incomuns que seus descobridores foram chamados de vigaristas (como era o caso dos ornitorrincos em 1797). Mas não só a fauna pode orgulhar-se de espécies atípicas, entre os representantes da flora encontram-se também os corvos brancos, nomeadamente, plantas que não querem fazer uma dieta ao sol, mas preferem insetos suculentos e outros pequenos animais como prato do dia. Anteriormente, já conhecemos um estudo em que cientistas examinaram a armadilha de Vênus e seus espinhos marginais.... Hoje temos que descobrir o quão sensíveis são esses espinhos. Cientistas da Universidade de Zurique (Suíça) conduziram uma série de experimentos práticos, com o objetivo de medir a velocidade da reação da armadilha voadora ao toque de uma determinada força. Como exatamente os cientistas "fizeram cócegas" no papa-moscas, com que rapidez ele reagiu e como esses resultados explicam as preferências gastronômicas da planta predadora? Encontraremos respostas para essas perguntas no relatório dos cientistas. Ir.
Base de pesquisa
Para não esticar essa narrativa, a descrição da armadilha voadora de Vênus (que já foi usada no artigo anterior) está escondida sob o spoiler:
O que é um flycatcher?
, . , . — , . , «» (, ) ( , ). 630 , , .
: . ( ), — , .

. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .

: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
: . ( ), — , .
. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .
: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
A ideia principal do mecanismo de acionamento da armadilha da armadilha da mosca do venus é que a futura presa precisa fazer dois toques nos cabelos sensíveis da planta em 30 segundos. Cada toque deles produz um potencial de ação * necessário para fechar a armadilha. Os cientistas acreditam nisso há 200 anos, mas a teoria é consistente com a prática?
Ao longo dos anos de pesquisa, os cientistas deduziram um cenário de eventos que deveria (em teoria) se desenrolar durante a caça de um papa-moscas:
- uma planta faminta atrai insetos secretando compostos voláteis;
- inseto pouco experiente explora a planta (esperando alimento de graça), durante a qual toca um dos seis fios sensíveis, causando o potencial de ação (AP de potencial de ação);
- 30 , «It’s a trap!», , ;
- (, ), (C12H18O3) .
Como resultado, as "pétalas" previamente abertas do papa-moscas se transformam em uma espécie de estômago, onde as presas malsucedidas serão digeridas.
Neste trabalho, os cientistas decidiram considerar em detalhes o processo de conversão da estimulação mecânica de cabelos sensíveis em um sinal elétrico. Sabemos com certeza que tocar em cabelos sensíveis abre canais iônicos mecanossensíveis, mas ainda não fomos capazes de identificar esses canais.
Enquanto esses canais putativos estão abertos, o potencial do receptor * (RP do potencial do receptor ) aumenta, e se a deflexão do cabelo for grande o suficiente, RP atinge um limiar acima do qual AP se manifesta.
* — , .
* — , .
* — .
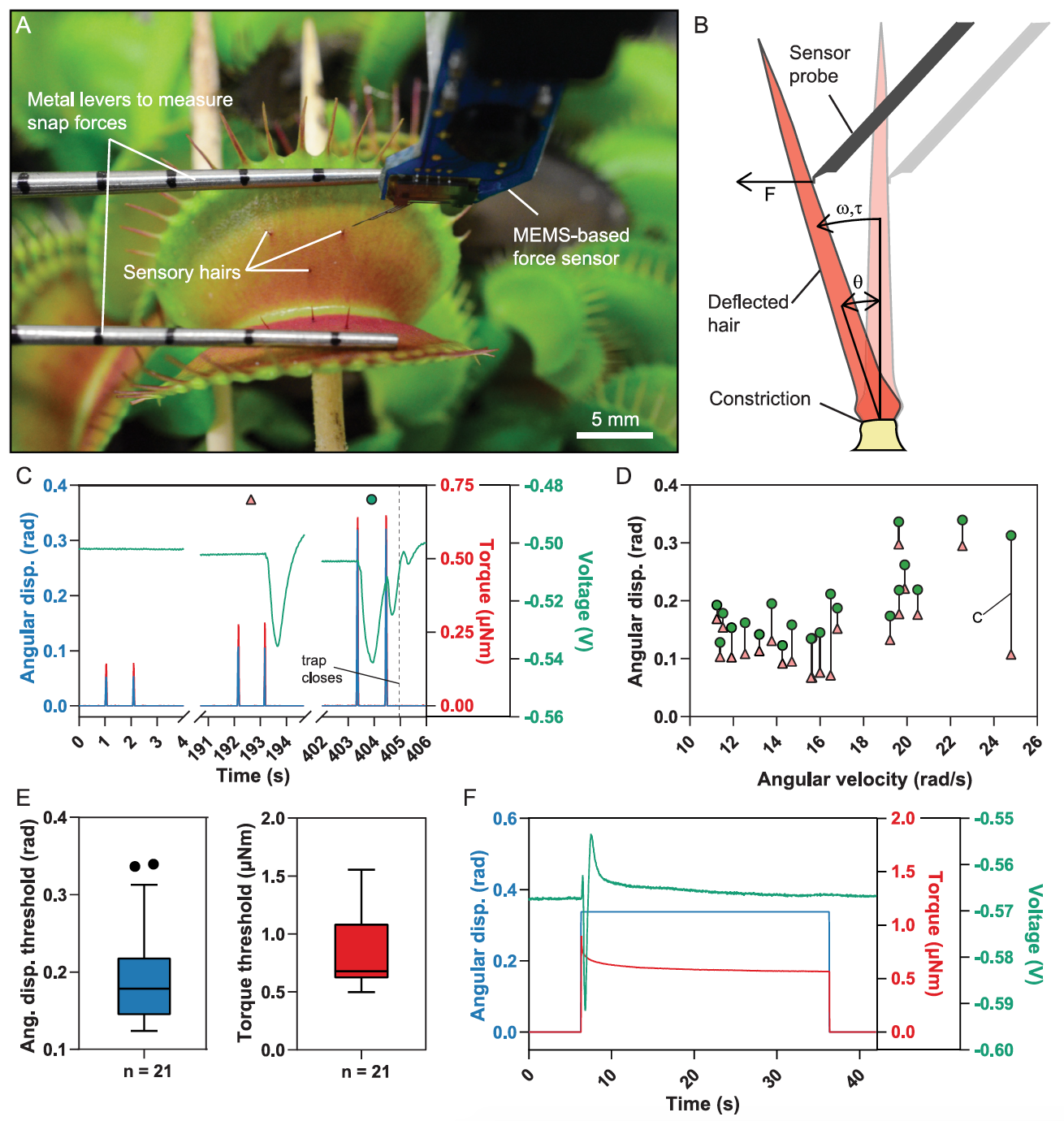
Imagem # 1
Houve tentativas anteriores de vincular estímulos mecânicos e geração de potencial de ação, mas não havia instrumentos adequados para medições precisas. No caso do estudo que estamos revisando hoje, os cientistas usaram um sensor de força baseado em MEMS * montado em um sistema microrobótico para controlar com precisão a velocidade e a amplitude da deflexão e, simultaneamente, medir a força aplicada ( 1A e 1B ).
MEMS * (sistemas microeletromecânicos) são dispositivos que combinam componentes microeletrônicos e micromecânicos.
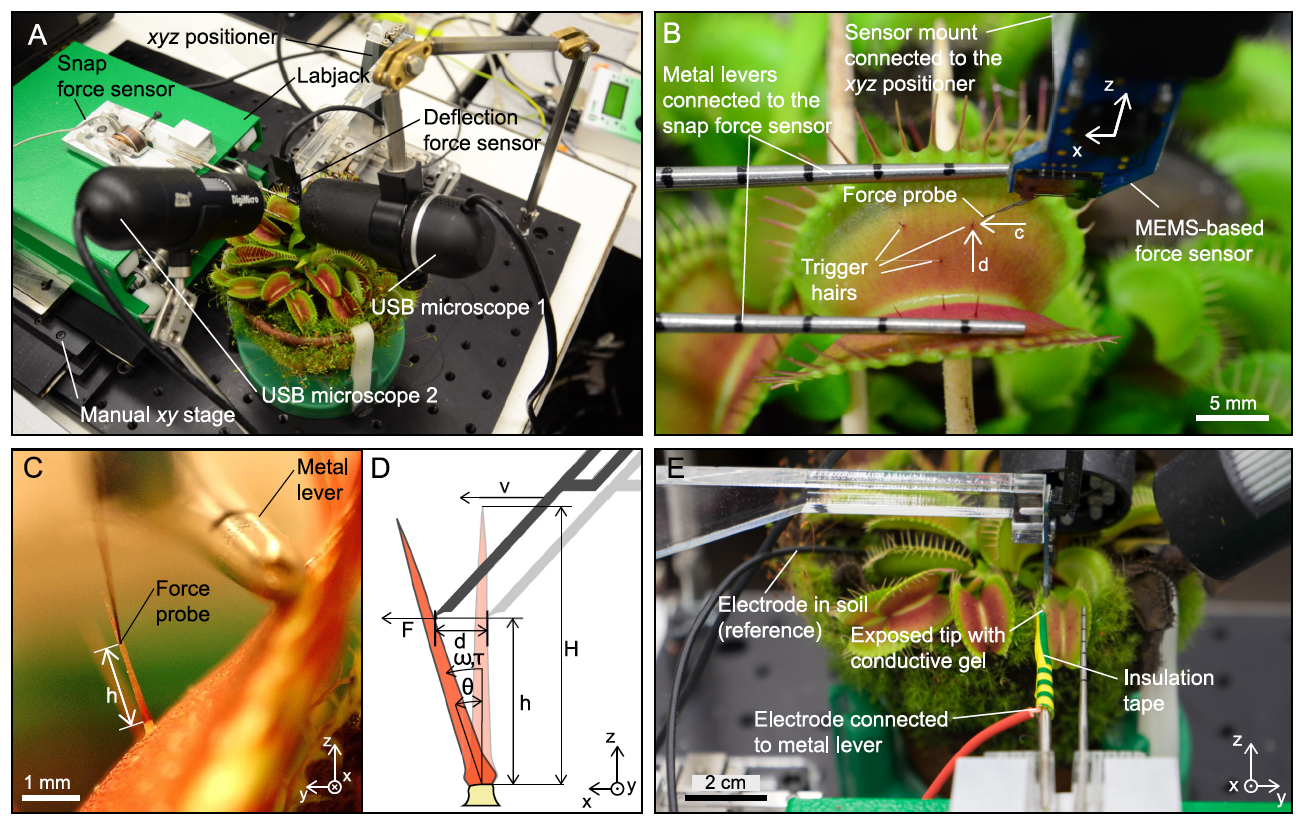
Imagem # 2
Desta forma, os cientistas foram capazes de determinar com precisão a gama de parâmetros em que a deflexão dos fios de cabelo leva ao fechamento da armadilha, enquanto o segundo sensor de força mede a força instantânea gerada (imagem acima).
Resultados da pesquisa
Durante os experimentos, os cientistas levaram em consideração que aranhas, moscas e formigas (presas comuns para um papa-moscas) fazem com que os pelos sensíveis se desviem rapidamente. Consequentemente, o sistema microrobótico foi implantado a toda velocidade para imitar esses estímulos. Isso resultou em uma alta velocidade angular inicial na faixa de 10 a 20 rad / s.
Estudos anteriores descobriram que as formigas desviam o cabelo sensível a uma velocidade angular de 0,25 - 7,8 rad / s, mas mais lentamente do que as moscas. Portanto, os parâmetros usados são mais altos do que os reais, o que é adequado para avaliar as capacidades da armadilha de Vênus.
Nessas altas velocidades, a duração da deflexão é significativamente menor do que outros fatores dependentes do tempo envolvidos, como cárie RP e relaxamento sensorial do cabelo (1F ).
Levar em consideração o desvio angular e não linear tornou possível corrigir as diferenças na altura de contato da sonda sensorial em relação ao local de estreitamento do cabelo sensorial, bem como as diferenças em relação às diferentes geometrias do cabelo sensorial ( 1B , 2C e 2D ). Portanto, uma deflexão pode ser aproximada por um aumento discreto no deslocamento angular e o acionamento AP é principalmente dependente da magnitude do deslocamento angular.
Uma deflexão foi definida como uma combinação de deslocamento angular para a frente e para trás, semelhante ao que ocorre quando uma presa toca um cabelo. Cada medição consistiu em duas deflexões subsequentes com um intervalo de 1 s entre elas até um determinado deslocamento angular θ. Se a armadilha não fechasse, uma fase de espera (2 minutos) seguia para garantir que o RP fosse completamente reiniciado. A espera de exatamente dois minutos, e não mais / menos, deve-se ao fato de que uma série de experimentos anteriores demonstraram que em temperaturas abaixo de 30 ° C, duas deflexões do cabelo dentro de 30–40 s são necessárias para fechar a armadilha rápida e completamente.
Após a fase de espera, o procedimento foi repetido com deslocamentos angulares crescentes até que o mecanismo de fechamento da armadilha fosse acionado ( 1C e 1D) Isso ocorreu quando o limiar de deslocamento médio θ = 0,18 rad ou o limiar de torque médio τ = 0,8 μN · m (n = 21) foi alcançado.
Os cientistas observam que o fechamento da armadilha nunca foi registrado se θ estava abaixo de 0,12 rad e τ estava abaixo de 0,50 μN · m ( 1E ). Conseqüentemente, esses indicadores são o limite inferior do desvio angular necessário para acionar o fechamento da armadilha nas condições deste experimento. Também foi possível determinar que para a armadilha funcionar, o inseto deve aplicar uma força (F) de 0,5 mN próximo às pontas dos cabelos ou 5 mN próximo à base.
As medições de AP forneceram uma ligação entre a deflexão sensorial do cabelo e o fechamento da armadilha. Quando dois desvios consecutivos estavam bem abaixo do limite de viés (θ << 0,12 rad), nenhum AP foi observado. Para as amplitudes de deflexão próximas ao limite de deslocamento (θ <0,12 rad), um único AP foi detectado após a segunda deflexão.
Isso indicou que ambas as deflexões do cabelo contribuíram para RP e que o limiar de indução de AP foi alcançado apenas na segunda deflexão. Como esperado, um único AP não foi suficiente para acionar a armadilha.
A suposição de que todo toque aciona AP só é válida se a deflexão dos fios sensoriais exceder o limite de deslocamento. Nesse caso, dois APs (um para cada deflexão do cabelo) foram gerados e causaram o fechamento da armadilha ( 1C ).
Dupla deflexão de cabelos sensíveis resultando em dois APs e fechamento da armadilha.
Esses resultados sugerem que a deflexão rápida de cabelos sensíveis aumenta o RP a um certo nível que depende da amplitude da deflexão angular. Os RPs podem empilhar e convocar AP após múltiplas deflexões se estiverem abaixo do limite de deflexão. No entanto, um AP por toque é gerado apenas se a deflexão dos fios sensoriais estiver acima do limite de deflexão.
Em outras palavras, o potencial de ação será gerado apenas quando o cabelo sensível tiver sido “perturbado” o suficiente. Mas o potencial de ação de um único tiro não é suficiente para acionar o fechamento da armadilha. Isso se encaixa bem com a teoria de que os papa-moscas não gastam energia fechando a armadilha toda vez que algo ou alguém toca em seus cabelos. Caso contrário, pode haver muitas armadilhas inativas sem nenhum retorno de energia (ou seja, nutricional) (a presa conseguiu escapar, a presa era muito pequena ou não era nenhuma presa, mas lixo).
Dado que o aumento no RP com múltiplos desvios é aditivo, seria lógico supor que o deslocamento sustentado (de longo prazo) de um cabelo pode ter um efeito semelhante.
Para testar essa hipótese, os cientistas rejeitaram o cabelo sensível do papa-moscas além do limite de deslocamento angular e o travaram nessa posição por 30 segundos ( 1F ). No entanto, isso não acionou as armadilhas.
O deslocamento inicial causou um único PA, após o qual a tensão voltou rapidamente à linha de base, embora os fios permanecessem desviados.
Se o viés sustentado contribuísse para o RP, ele teria que permanecer acima do limite, caso em que uma série AP era esperada. Análises adicionais mostraram que o desalinhamento angular desempenha um papel importante no RP, mas a deflexão estática do cabelo não contribui de forma alguma.
É curioso que em experimentos anteriores a situação fosse diferente: um único deslocamento dos fios de cabelo levava ao fechamento da armadilha. No entanto, este não foi um deslocamento único integral, mas muitos pequenos deslocamentos, uma vez que as oscilações que são acompanhadas pela deflexão manual de um fio de cabelo são provavelmente maiores que o limiar de deslocamento angular.
A próxima etapa do estudo foi criar um modelo de acúmulo de carga eletromecânica (BCE ), que surpreendentemente prevê o fechamento de armadilhas com um único toque.
Com base nos dados obtidos durante os experimentos, os cientistas desenvolveram um modelo simples para estudar os limites de deslocamento angular e velocidade dentro dos quais as armadilhas irão reagir.
No modelo ECB, a deflexão mecânica resulta no acúmulo de carga RP em função da velocidade angular ω e do deslocamento θ, enquanto as cargas são dissipadas continuamente. Se as cargas acumuladas excederem um certo limite Qth RP , ocorre um AP. Além disso, um período refratário t RP foi implementado , representando o intervalo de tempo necessário para que outro AP seja ativado.
Como resultado, o modelo previu que se os desvios forem muito rápidos e / ou muito pequenos, mais de dois desses desvios podem ser necessários para fazer com que a armadilha feche (área vermelha em 3A ).

Imagem # 3
Isso se deve ao fato de que uma deflexão não é suficiente para ativar o AP ( 3B), conforme demonstrado por experiências práticas ( 1C , centro).
Da mesma forma, o modelo mostrou que velocidades angulares muito baixas (ω <0,04 rad / s) não podem preencher RP.
Mas o resultado mais inesperado da simulação foi a previsão da faixa de velocidades angulares intermediárias (0,04 rad / s <ω <10 rad / s), em que uma deflexão é suficiente para ativar dois ou mais APs, que são necessários para fechar a armadilha ( 3B ).
No entanto, tal previsão contradiz a ideia de como funciona o mecanismo da armadilha da armadilha da mosca de venus. Portanto, os cientistas decidiram verificar se esta situação modelo pode ser realizada na prática.
Uma única deflexão de cabelos sensíveis resultando no fechamento da armadilha.
Surpreendentemente, o fechamento da armadilha realmente ocorreu com uma única deflexão dos fios de cabelo se as velocidades angulares fossem baixas o suficiente.
Para diminuir a faixa de valores em que isso ocorre, os cientistas desviaram repetidamente os mesmos fios de cabelo sensoriais em velocidades angulares diferentes até que a armadilha se fechasse. Houve um intervalo de 2 minutos entre duas deflexões consecutivas até que a armadilha se recuperou e RP foi esgotado.
O limite inferior da velocidade angular ω necessária para fechar a armadilha em uma deflexão foi determinado aumentando gradualmente a velocidade angular após cada deflexão (n = 17). A velocidade inicial foi inferior a 0,009 rad / s, uma vez que a armadilha nunca foi fechada nesta velocidade.
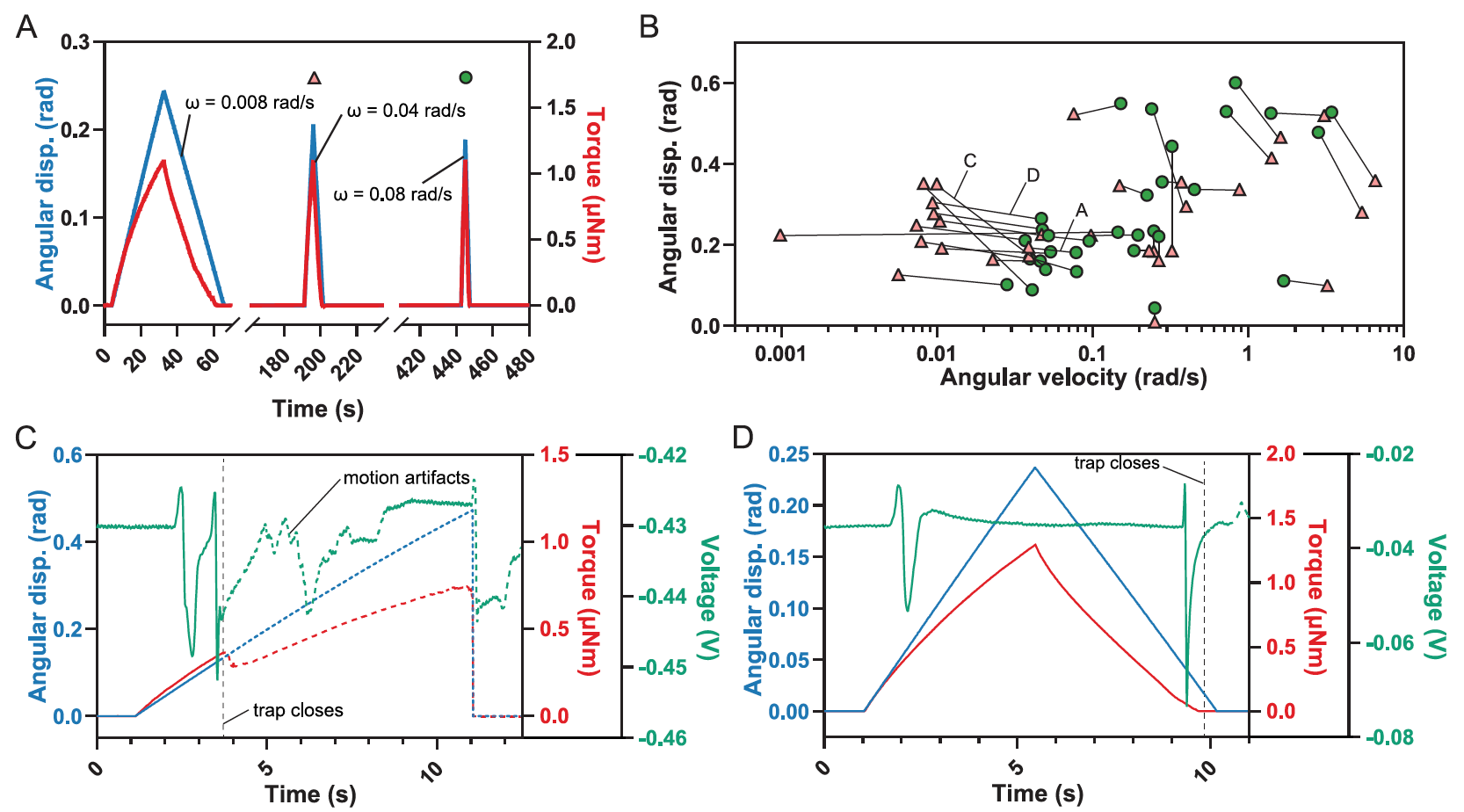
Imagem # 4
As deflexões únicas subsequentes do cabelo foram realizadas com um aumento gradual na velocidade até que a armadilha fosse acionada ( 4A ).
O limite superior foi determinado de maneira semelhante, começando com uma velocidade de ω> 3 rad / s seguida por uma diminuição gradual (n = 9).
Além disso, outra série de experimentos com uma deflexão (n = 5) foi realizada, em que a velocidade da sonda de força foi mantida constante, o que levou a uma velocidade angular intermediária entre 0,2 e 0,4 rad / s, enquanto o deslocamento angular θ aumentou gradualmente durante o tempo de deflexões subsequentes para obter o limite inferior θ necessário para a armadilha operar sob as condições de uma única deflexão de cabelos.
Todas as deflexões únicas que levam ao fechamento da armadilha, juntamente com os estímulos anteriores para os quais nenhum fechamento da armadilha ocorreu, identificaram a região onde uma única deflexão causa o fechamento ( 4B ).
Uma única deflexão pode fazer com que a armadilha se feche em velocidades angulares intermediárias de deflexão (0,03 rad / s ≤ ω ≤ 4 rad / s). Mas a deflexão sozinha em velocidades mais baixas ou mais altas não será suficiente.
Experimentos, nos quais a taxa de deflexão dos fios de cabelo era bastante baixa, mostraram que a armadilha foi acionada tanto quando o sensor se aproximou da base do cabelo quanto quando o sensor se afastou dela.
Uma única deflexão de cabelos sensíveis resultando em dois APs durante a flexão inicial, resultando no fechamento da armadilha.
Quando a armadilha foi fechada durante a abordagem da sonda, dois potenciais de ação sucessivos ( 4C ) foram observados durante a deflexão dos fios . Quando a armadilha foi fechada durante a retirada da sonda, um PA apareceu no momento da deflexão do cabelo e o segundo após a retirada da sonda, quando o cabelo voltou à posição original ( 4D ). Em ambos os casos, o segundo AR levou ao fechamento imediato da armadilha.
Em conclusão, os cientistas decidiram medir a força de fechamento da armadilha ( 5A ).
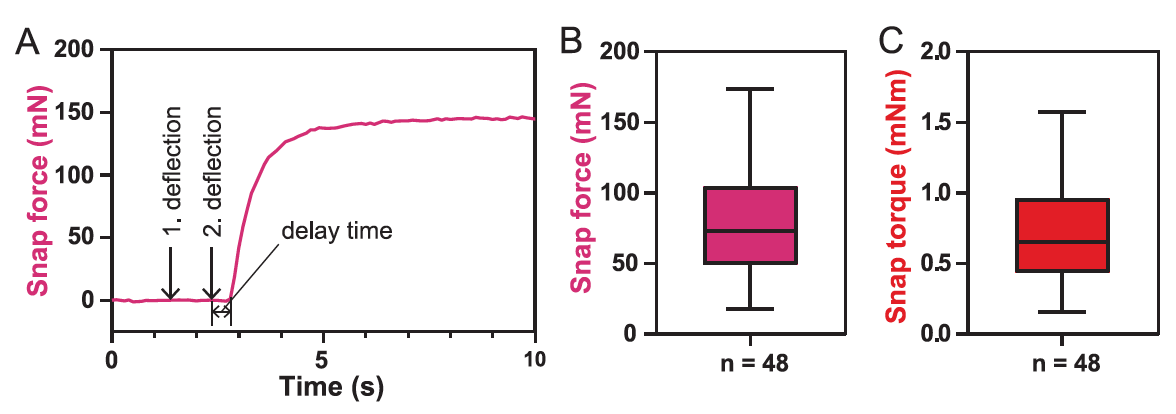
Imagem No. 5
Para a armadilha 48, o valor médio da força de preensão F de fechamento foi 73 mN ( 5V), e a faixa de valores foi de 18 a 174 mN.
Esses valores são inferiores aos publicados anteriormente (140-150 mN). Há uma explicação para isso: neste caso, a força foi medida no início do fechamento da armadilha e, em observações anteriores, foi medida a força que atua nas bordas dos folhetos da armadilha de folhas ao término do fechamento.
Uma vez que a força medida é altamente dependente da posição do transdutor, bem como da orientação e tamanho da folha, o torque de fechamento τ próximo ao meio da folha com um valor médio de 0,65 mN m é o melhor valor para descrever a força de fechamento da armadilha ( 5C ). O tempo de retardo, ou seja, o tempo entre o estímulo mecânico e o início do fechamento da armadilha, foi de 0,6 ± 0,3 s.
Para um conhecimento mais detalhado das nuances do estudo, recomendo que você dê uma olhada emrelatório de cientistas .
Epílogo
A armadilha de Vênus não corre como uma chita, não tem veneno mortal como uma cobra e certamente não ouve sua presa como uma coruja. Mas esta planta é de fato um dos melhores carnívoros do planeta, pois seu mecanismo de caça funciona como um relógio.
Neste trabalho, os cientistas foram capazes de determinar quais seriam esses ou aqueles parâmetros para que a armadilha funcionasse. Como se descobriu, na maioria dos casos, para acionar a armadilha, a vítima deve cometer dois erros consecutivos: primeiro, tocar o cabelo sensorial da armadilha; a segunda é fazer de novo.
O repetido desvio do cabelo de sua posição inicial leva à geração de um segundo potencial de ação, que inicia o processo de fechamento da armadilha. No entanto, a modelagem mostrou que, em certas condições, um toque pode ser suficiente, mas na realidade isso é provavelmente improvável.
Em outras palavras, a ratoeira de Vênus pode servir como um caçador de mosquitos? Não, porque esses sugadores de sangue são muito pequenos e muito ágeis. Mas o flycatcher não se arrepende de moscas ou caracóis.
Obrigado pela atenção, fiquem curiosos e tenham um ótimo final de semana galera! :)
Um pouco de publicidade
Obrigado por ficar com a gente. Você gosta de nossos artigos? Quer ver mais conteúdo interessante? Ajude-nos fazendo um pedido ou recomendando a amigos VPS em nuvem para desenvolvedores a partir de US $ 4,99 , um análogo exclusivo de servidores básicos que inventamos para você: The Whole Truth About VPS (KVM) E5-2697 v3 (6 núcleos) 10 GB DDR4 480 GB SSD 1 Gbps de $ 19 ou como dividir o servidor corretamente? (opções disponíveis com RAID1 e RAID10, até 24 núcleos e até 40 GB DDR4).
O Dell R730xd 2x é mais barato no data center Equinix Tier IV em Amsterdã? Apenas temos 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV a partir de $ 199 na Holanda!Dell R420 - 2x E5-2430 2.2 Ghz 6C 128 GB DDR3 2x960 GB SSD 1 Gbps 100 TB - a partir de $ 99! Leia sobre como construir a infraestrutura do prédio. classe com o uso de servidores Dell R730xd E5-2650 v4 a um custo de 9.000 euros por um centavo?