Este pequeno volume de trabalho foi realizado com urgência para fins educacionais e de demonstração há cerca de um ano, com base em um modelo de cordas desenvolvido anteriormente. Como de costume, depois de ficar ociosa por um certo tempo, ela recentemente chamou minha atenção.
Não adianta dizer o que é Scilab - o leitor sabe como usar a Internet.

Interessante para o leitor já familiarizado com o Scilab, este trabalho pode ser uma aplicação bastante não trivial desta ferramenta. Isso se refere à abordagem de "elemento finito" para modelagem do sistema e exibição de animação dos resultados com um osciloscópio. Claro, existem ferramentas especialmente "afiadas" para a mecânica, mas, repito, o objetivo era testar o Scilab com urgência.
Para quem não estava familiarizado com esta ferramenta simples e visual antes, será interessante saber disso. Todo o processo de domínio deste tipo de software até então desconhecido (programação visual), desde o momento de instalação do Xcos grátis até a criação do texto seguinte, me levou cinco dias. Um modelo mais simples de sistema com um grau de liberdade finalmente ficou pronto no segundo dia. E para você, eu acho, as coisas no estudo deste ambiente de software, se desejado, não irão piorar, então vá em frente.
O texto em si talvez seja muito lacônico, uma vez que não se destinava originalmente a um público amplo. Mas se o leitor tiver alguma dúvida, tentarei me lembrar dos detalhes e responder a essas perguntas. Então.
O sistema mecânico ("corda vibrando em um meio viscoso"), considerado em detalhes neste artigo , representa o seguinte:
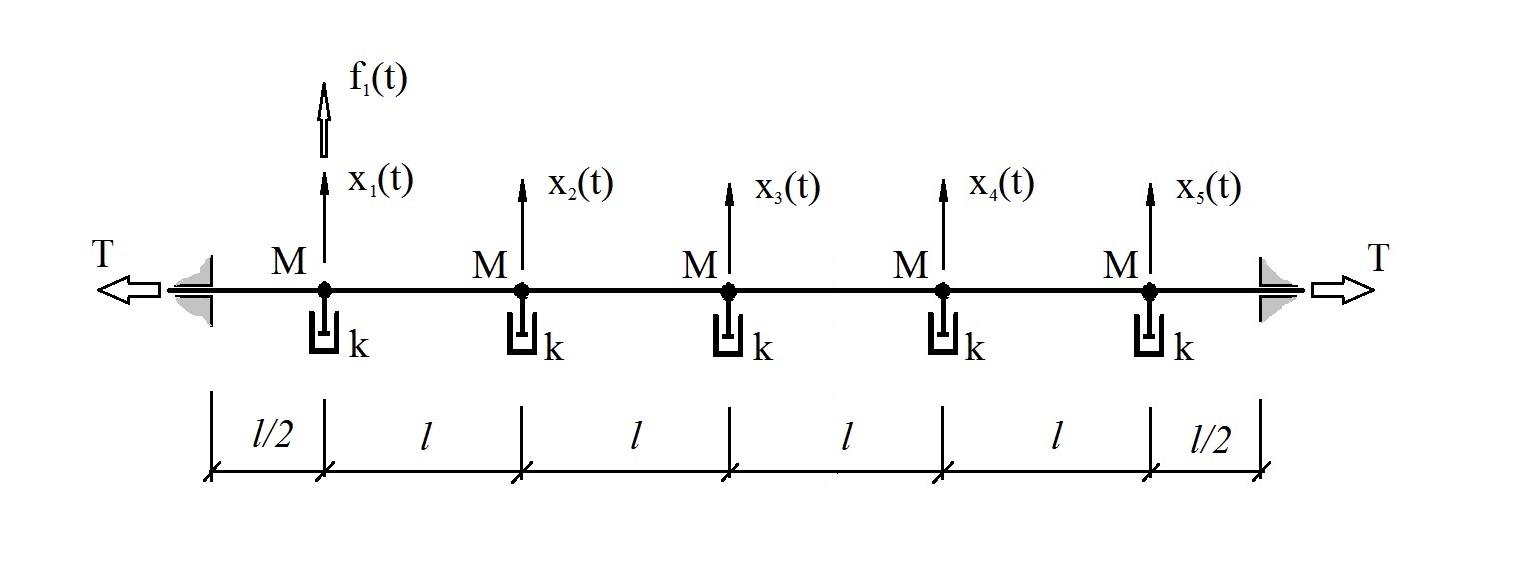
onde Δt = 0,01s, l = 1m, M = 1kg, k = 10 kg / s, T = 2000H
Para simplificar a modelagem e ampliando as possibilidades de modificação do modelo, o modelo é dividido em elementos que

foram modelados como subsistemas ("superquadras").
O seguinte "diagrama" (modelo) é construído no sistema de programação visual Xcos
O "diagrama" (modelo) permite simular o comportamento do sistema sob a influência de um único impulso aplicado ao nó (elemento) nº 1, registrando e exibindo graficamente a influência externa no nó nº 1 e a resposta (deslocamento) do sistema nos nós nº 1,2,3, e também exibir visualmente o comportamento do sistema na forma de uma imagem condicional animada
Cada um dos cinco "superblocos" (subsistemas) incluídos no "diagrama" representa o seguinte

O bloco recebe do sistema principal dados sobre influências externas, comprimentos e deslocamentos de elementos conjugados, hora do relógio, valor do intervalo de amostragem de tempo e tensão da corda. O bloco em suas configurações contém dados sobre seu comprimento, massa e coeficiente de amortecimento, que podem ser alterados para fins de simulação. (A possibilidade de bloqueio do bloco declarado pelo desenvolvedor Xcos não pôde ser realizada devido, aparentemente, a mau funcionamento do software.)
O bloco integra a ODE linear correspondente pelo método das diferenças finitas. As condições iniciais de integração zero são implementadas usando os padrões do sistema Xcos.
O bloco transmite dados sobre seus movimentos (no tempo do relógio do sistema) e comprimento (constante) para o sistema principal.
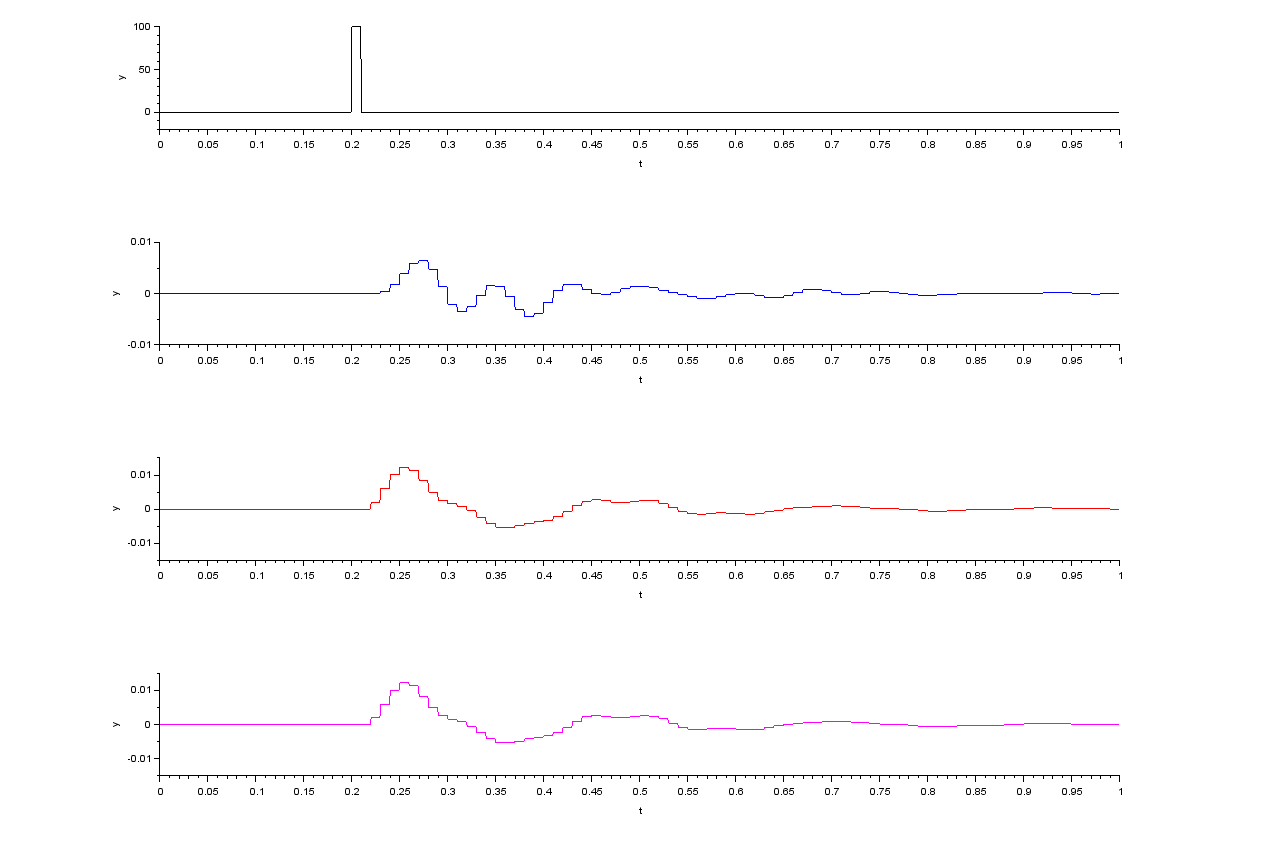
Os seguintes resultados de modelagem de simulação foram obtidos.

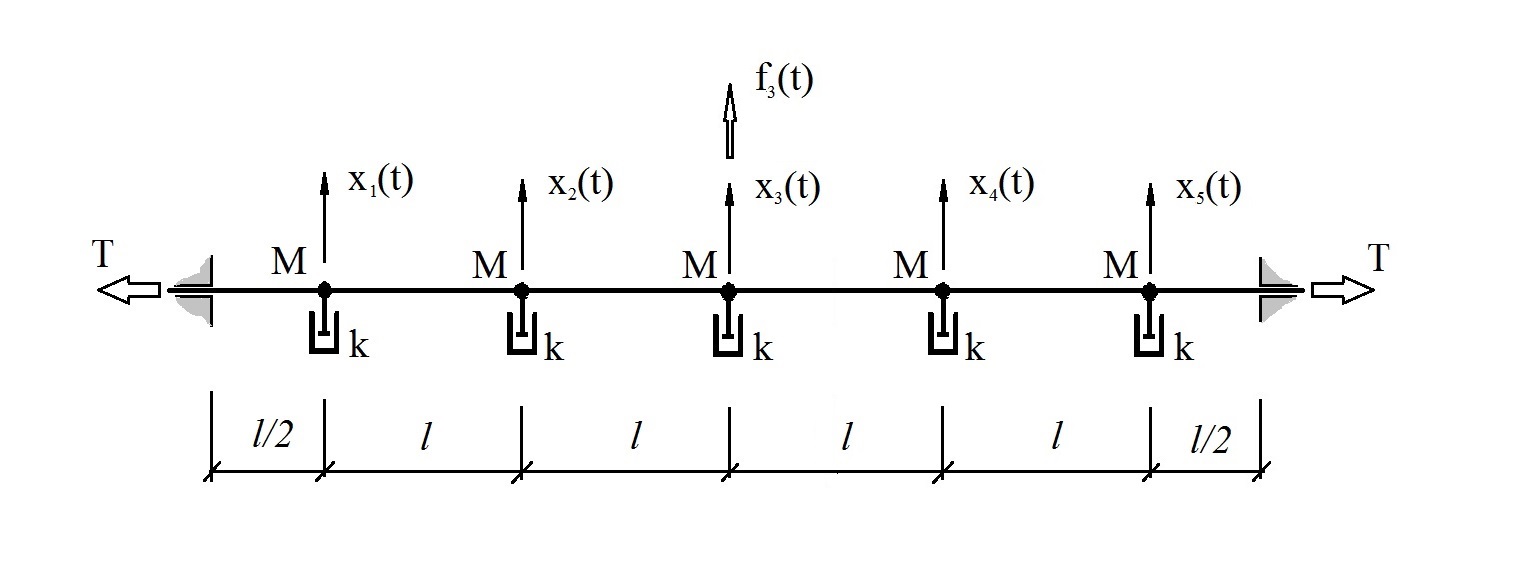
Além disso, para fins de uma divulgação mais completa das propriedades de ressonância do sistema, uma simulação foi realizada semelhante à anterior, com uma influência externa aplicada ao meio da coluna (no nó nº 3).

Os seguintes resultados de modelagem de simulação foram obtidos:

Isso é tudo Boa sorte em aprender Scilab, todos.