Processadores neuromórficos, construídos com base no princípio da interação de neurônios, apresentam os melhores resultados no campo das redes neurais artificiais / tarefas de visão de máquina. No entanto, eles estão longe de imitar os processos que ocorrem no cérebro. Uma das muitas razões são os astrócitos, as células gliais mais abundantes.
Acreditava-se que elas tivessem uma função de suporte para os neurônios, mas pesquisas nas últimas décadas mostram que esse tipo de célula faz muito mais do que preencher o espaço entre os neurônios, como os pesquisadores acreditaram por mais de um século. A pesquisa mostra que essas células também desempenham papéis importantes nas funções cerebrais, incluindo aprendizagem e geração de padrão central (GPC), que é a base para comportamentos rítmicos, como respirar e andar.
Contras das soluções neuromofílicas existentes
A suposição de que o aprendizado ocorre apenas com fortes conexões entre neurônios está incorreta. Na verdade, o aprendizado e a memória são perfeitamente equilibrados em redes que
operam macroscopicamente à beira do caos , modo dinâmico estreito
amplamente ignorado nos algoritmos de aprendizado, mas também manifestado pelo cérebro.
Para a maior parte, as soluções neuromórficas carecem da combinação da eficiência computacional de um objetivo de rede global com a universalidade de um mecanismo local dependente de atividade.
Rede neural-astrocítica
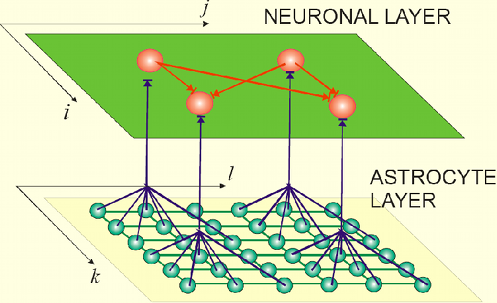
Reconhecendo essa lacuna na literatura existente, os pesquisadores da Rutgers University estão desenvolvendo algoritmos cerebrais que também explicam e reproduzem a função dos astrócitos.
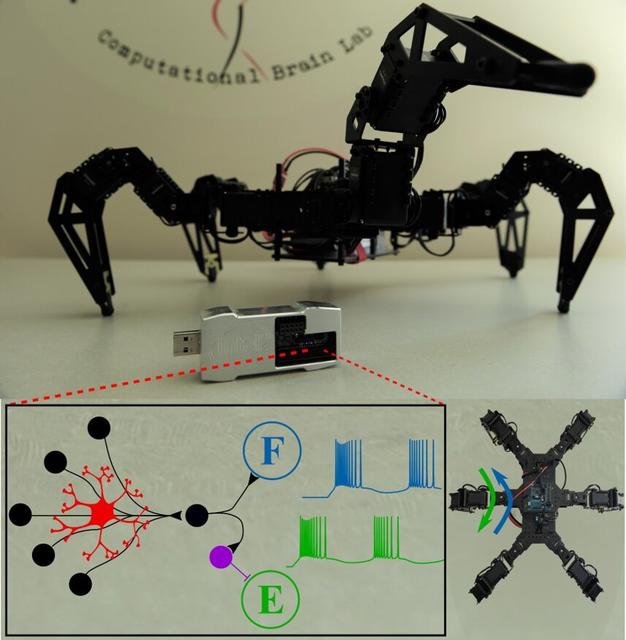
Eles propõem (cuidado, tautologia) um controlador de CPG mórfico do cérebro baseado em uma rede neural-astrocítica abrangente que gera dois padrões de marcha para um robô. Com base em mecanismos de neuromodulação astrocítica recém-identificados, eles nos propõem uma arquitetura CPG que se integra perfeitamente ao chip neuromórfico Intel Loihi usando um ambiente de interação em tempo real entre o chip e o ambiente do sistema operacional robótico (ROS).
O Loihi CPG pode ser usado para controlar um robô que anda com resistência a ruídos sensoriais e perfis de velocidade variável.
É extremamente interessante observar o desenvolvimento de novas abordagens arquitetônicas no campo da imitação do trabalho do cérebro. Pesquisas e experimentos estão em andamento e mudarão muito nossas vidas no futuro. E nossos empregos.